This is a glossary for the terminology applied in the mathematical theories of Lie groups and Lie algebras. For the topics in the representation theory of Lie groups and Lie algebras, see Glossary of representation theory. Because of the lack of other options, the glossary also includes some generalizations such as quantum group.
1. Élie Cartan (1869 – 1951), a French mathematician
2. A Cartan subalgebra of a Lie algebra is a nilpotent subalgebra satisfying .
3. Cartan criterion for solvability: A Lie algebra is solvable iff .
4. Cartan criterion for semisimplicity: (1) If is nondegenerate, then is semisimple. (2) If is semisimple and the underlying field has characteristic 0 , then is nondegenerate.
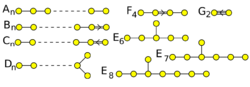
5. The Cartan matrix of the root system is the matrix , where is a set of simple roots of .
2. The centralizer of a subset of a Lie algebra is .
center
1. The center of a Lie group is the center of the group.
2. The center of a Lie algebra is the centralizer of itself :
central series
1. A descending central series (or lower central series) is a sequence of ideals of a Lie algebra defined by
2. An ascending central series (or upper central series) is a sequence of ideals of a Lie algebra defined by (center of L) , , where is the natural homomorphism
1. Sophus LieSophus Lie (1842 – 1899), a Norwegian mathematician
2. A Lie group is a group that has a compatible structure of a smooth manifold.
{{defn|no=3|1=A Lie algebra is a vector space over a field with a binary operation [·, ·] (called the Lie bracket or abbr. bracket) , which satisfies the following conditions: ,
Let be a finite-dimensional complex solvable Lie algebra over algebraically closed field of characteristic , and let be a nonzero finite dimensional representation of . Then there exists an element of which is a simultaneous eigenvector for all elements of .
2. A regular element with respect to a root system.
Let be a root system. is called regular if .
For each set of simple roots of , there exists a regular element such that , conversely for each regular there exist a unique set of base roots such that the previous condition holds for . It can be determined in following way: let . Call an element of decomposable if where , then is the set of all indecomposable elements of
root
1. root of a semisimple Lie algebra:
Let be a semisimple Lie algebra, be a Cartan subalgebra of . For , let . is called a root of if it is nonzero and
The set of all roots is denoted by ; it forms a root system.
4. Positive root of root system with respect to a set of simple roots is a root of which is a linear combination of elements of with nonnegative coefficients.
5. Negative root of root system with respect to a set of simple roots is a root of which is a linear combination of elements of with nonpositive coefficients.
6. long root
7. short root
8. inverse of a root system: Given a root system . Define , is called the inverse of a root system.
is again a root system and have the identical Weyl group as .
9. base of a root system: synonymous to "set of simple roots"
10. dual of a root system: synonymous to "inverse of a root system"
S
Serre
Serre's theorem states that, given a (finite reduced) root system , there exists a unique (up to a choice of a base) semisimple Lie algebra whose root system is .
simple
1. A simple Lie group is a connected Lie group that is not abelian which does not have nontrivial connected normal subgroups.
2. A simple Lie algebra is a Lie algebra that is non abelian and has only two ideals, itself and .
3. simply laced group (a simple Lie group is simply laced when its Dynkin diagram is without multiple edges).
4. simple root. A subset of a root system is called a set of simple roots if it satisfies the following conditions:
is a linear basis of .
Each element of is a linear combination of elements of with coefficients that are either all nonnegative or all nonpositive.
1. Hermann Weyl (1885 – 1955), a German mathematician
2. A Weyl chamber is one of the connected components of the complement in V, a real vector space on which a root system is defined, when the hyperplanes orthogonal to the root vectors are removed.
3. The Weyl character formula gives in closed form the characters of the irreducible complex representations of the simple Lie groups.
4. Weyl group: Weyl group of a root system is a (necessarily finite) group of orthogonal linear transformations of which is generated by reflections through hyperplanes normal to roots of
References
↑Editorial note: the definition of a nilpotent element in a general Lie algebra seems unclear.
Bourbaki, N. (1981), Groupes et Algèbres de Lie, Éléments de Mathématique, Hermann
Humphreys, James E. Introduction to Lie Algebras and Representation Theory, Second printing, revised. Graduate Texts in Mathematics, 9. Springer-Verlag, New York, 1978. ISBN0-387-90053-5
Jacobson, Nathan, Lie algebras, Republication of the 1962 original. Dover Publications, Inc., New York, 1979. ISBN 0-486-63832-4
 From HandWiki - Reading time: 12 min
From HandWiki - Reading time: 12 min







 EncycloReader
is supported by the
EncycloReader
is supported by the