InSight
 From Wikipedia (Fr) - Reading time: 66 min
From Wikipedia (Fr) - Reading time: 66 min
Pour les articles homonymes, voir Insight.
Sonde spatiale

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Discovery |
| Domaine | Étude de la structure interne de Mars. |
| Type de mission | Atterrisseur |
| Statut | Mission achevée (21 décembre 2022) |
| Autres noms | GEMS |
| Lancement | 5 mai 2018 |
| Lanceur | Atlas V 401 |
| Durée |
4 années terrestres (mission primaire+extension) |
| Identifiant COSPAR | 2018-042A |
| Site | https://mars.nasa.gov/insight/ |
| Masse au lancement |
694 kg dont atterrisseur 358 kg |
|---|---|
| Masse instruments | 50 kg |
| Ergols | Hydrazine |
| Masse ergols | 67 kg |
| Source d'énergie | Panneaux solaires |
| Puissance électrique |
600-700 watts (atterrisseur sur Mars) |
| Atterrissage | 26 novembre 2018 |
|---|---|
| Localisation |
Elysium Planitia 4,5° N, 135° E |
| SEIS | Sismomètre passif |
|---|---|
| HP3 | Capteur de flux de chaleur |
| APSS | Station météorologique |

InSight (acronyme de l'anglais Interior Exploration using Seismic Investigations, Geodesy and Heat Transport ; en français : « Exploration interne par les sondages sismiques, la géodésie et les flux thermiques ») est une mission d'exploration de la planète Mars développée par l'agence spatiale américaine, la NASA, et qui a décollé le pour atterrir à la surface de la planète le .
La mission InSight est la première entièrement consacrée à l'étude de la structure interne de cette planète. Pour y parvenir, elle emporte deux instruments scientifiques : le sismomètre SEIS et HP3, instrument de mesure des flux de chaleur en provenance du cœur de la planète. L'objectif scientifique principal de la mission est de disposer d'une meilleure connaissance de la structure interne de la planète, dont les caractéristiques sont mal connues, dans le but de reconstituer l'histoire de Mars. Les données collectées permettront également d'améliorer les modèles de formation et d'évolution des planètes rocheuses du Système solaire — Mercure, Vénus, la Terre, Mars — ainsi que de la Lune.
Lorsque la mission InSight est sélectionnée en 2012, dans le cadre du programme Discovery de la NASA, elle constitue l'aboutissement de plusieurs projets proposés sans succès au cours des deux décennies qui ont précédé. Le programme Discovery regroupe des projets spatiaux américains caractérisés par un coût modéré et un cycle de développement court. Pour rentrer dans cette contrainte budgétaire, la mission repose sur l'envoi d'une station au sol unique contrairement aux projets précédents. La sonde spatiale réutilise l'architecture de la mission Phoenix, qui s'était posée en 2007 dans la région polaire de Mars. C'est un engin de relativement petite taille (moins de 700 kilogrammes, au lancement). La charge utile est fournie par des partenaires européens. L'instrument principal, le sismomètre SEIS est conçu par l'Institut de physique du globe de Paris et fourni sous maîtrise d’œuvre de l'agence spatiale française (CNES), tandis que HP3 est développé par l'Allemagne.
Un problème de mise au point sur l'instrument SEIS repousse le lancement de la mission, prévu initialement en 2016, à la fenêtre de lancement suivante vers Mars en 2018. InSight se pose à la surface de Mars le dans une région de plaine baptisée Elysium Planitia et située près de l'équateur de cette planète. La phase d'étude scientifique doit durer deux années terrestres. Le sismomètre SEIS entre en service début et pour la première fois dans l'histoire de l'exploration de Mars, un séisme est détecté le . L'instrument HP3, qui nécessite l'enfoncement d'une sonde dans le sol, rencontre un problème lié à la nature du sol, que l'équipe sur Terre tente de résoudre avant de renoncer à faire fonctionner l'instrument en . La mission est prolongée de deux ans pour durer théoriquement jusqu'à fin 2022, et l'accumulation de la poussière sur les panneaux solaires fait que la NASA annonce effectivement la fin de la mission le , après deux tentatives infructueuses d'entrer en contact avec la sonde.
Les séismes détectés par l'instrument SEIS se révèlent plus nombreux que prévu mais d'une intensité plus faible (magnitude de 4 au maximum). Malgré la faiblesse des signaux sismiques, les scientifiques déterminent que la croûte de la planète a une épaisseur comprise entre 24 et 72 kilomètres et que le rayon du noyau métallique, évalué à 1 830 kilomètres, se situe à la limite supérieure des prévisions. La mission révèle ainsi une caractéristique importante, la minceur de la couche située entre le noyau et la croûte (le manteau), qui a dû entraîner le refroidissement rapide de la planète.
Contexte : l'étude sismique des autres planètes
[modifier | modifier le code]L'importance du sismomètre pour l'étude in situ des planètes est identifiée dès le début de l'ère spatiale. Cet instrument, qui mesure les mouvements internes d'une planète[a], permet d'obtenir des informations sur sa structure : caractéristiques et taille du noyau de la planète, de son manteau, etc. Celles-ci permettent à leur tour de reconstituer l'histoire de ses origines et de son évolution, et à travers celle-ci fournissent des indices sur la formation du Système solaire.
Étude sismique de la Lune au début de l'ère spatiale (1961-1973)
[modifier | modifier le code]Les sondes spatiales Ranger 3 à 5 (1961-1965) de l'agence spatiale américaine (NASA), premiers engins à tenter de se poser sur un autre corps du Système solaire (la Lune), sont équipées de sismomètres. Les missions Apollo (1969-1972) développées par la NASA installent également des sismomètres très performants à la surface de la Lune[1].
Sismomètres des sondes martiennes Viking (1976)
[modifier | modifier le code]En ce qui concerne la planète Mars, les sondes spatiales Viking 1 et 2, premiers engins de la NASA à effectuer un atterrissage à la surface de la planète (1976), emportent également des sismomètres, mais l'objectif principal de ces missions porte sur la recherche de traces de vie passée ou actuelle sur la planète. Le sismomètre, qui pèse 2,2 kg et consomme 3,5 watts, est peu sophistiqué et d'une sensibilité de l'ordre du nanomètre, dix fois moins bonne que celle des instruments installés sur la Lune au cours des missions Apollo. Les géophysiciens concepteurs de l'expérience ont été contraints d'accepter que l'instrument soit installé sur le pont de l'atterrisseur au lieu d'être en contact direct avec le sol. Les données collectées doivent être fortement compressées avant d'être transmises vers la Terre et donc dégradées, car le débit de la liaison avec la Terre est réduit. Le premier sismomètre embarqué à bord de Viking 1 arrive sur le sol martien le , mais les opérateurs sur Terre ne parviennent pas à mettre l'instrument en état de marche. Pour le protéger des chocs durant les différentes phases du vol où le sismomètre est soumis à de fortes accélérations, sa partie mobile est verrouillée jusqu'à l'arrivée au sol. Les opérateurs ne parviennent pas à débloquer ce verrou et le sismomètre sera le seul instrument non opérationnel de tout le programme Viking. Le , c'est au tour de Viking 2 de se poser sur le sol martien. Cette fois le sismomètre peut être activé, mais les scientifiques constatent rapidement que les données collectées n'ont rien à voir avec des mouvements sismiques. Solidaire du pont de l'atterrisseur, l'instrument enregistre tous les mouvements mécaniques affectant celui-ci : rotation de l'antenne grand gain orientable, déplacement du bras robotique, fonctionnement du magnétophone et surtout action du vent qui fait vibrer la plateforme. Seules les mesures faites de nuit, caractérisées par une diminution du vent et l'absence d'activité des instruments, sont éventuellement exploitables. Mais la faible sensibilité de l'instrument, conjuguée avec les doutes sur l'origine des mouvements enregistrés, ne permettent pas d'en tirer des données réellement utilisables. Par la suite, aucun sismomètre n'est installé sur les sondes spatiales à destination de la surface de Mars, bien que de nombreuses missions soient proposées dans ce but[2].
Projets de réseau de sismomètres martiens
[modifier | modifier le code]Au début des années 1990, la mission Mars Network prévoit l'installation d'une douzaine de stations sismiques à la surface de Mars. Ce projet n'aboutissant pas, MESUR (Mars Environmental SURvey), puis MarsNet sont proposées et enfin, en collaboration avec l'Agence spatiale européenne, InterMarsNet. Ce dernier projet prévoyait le déploiement, au cours des années 2001-2003, de 16 à 20 stations fixes, comprenant à la fois un sismomètre et une station météorologique. Le coût élevé du projet et la priorité accordée à la recherche des formes de vie sur Mars aboutissent à l'annulation en 1996 de la mission. À la même époque, la Russie prépare une mission ambitieuse, Mars 96, qui doit déposer des sismomètres à la surface de Mars, mais la sonde spatiale est perdue lors du lancement (). L'agence spatiale française, le Centre national d'études spatiales (CNES), propose à la fin des années 1990 NetLander, un projet comprenant quatre stations fixes équipées de capteurs sismiques. Ces instruments sont d'abord proposés pour le projet de l'Agence spatiale européenne Mars Express, avant d'être incorporés dans la mission de retour d'échantillons martiens que le CNES élabore en 2003 avec la NASA. Mais ce projet très coûteux est également abandonné. Il est brièvement envisagé d'inclure le sismomètre SEIS, développé par le CNES pour les missions précédentes, dans le programme ExoMars de l'Agence spatiale européenne[1].
Adoption d'une architecture à sismomètre unique
[modifier | modifier le code]Jusque-là, l'installation de plusieurs stations largement espacées était jugée nécessaire pour pouvoir collecter des données pertinentes. Face au coût important de cette architecture, qui avait fait obstacle à sa réalisation, un groupe de géophysiciens choisit au milieu des années 2000 de mettre au point une nouvelle technique de mesure reposant sur un sismomètre unique à trois composants large bande. La solution adoptée permet de déterminer la structure interne de la planète avec une seule station de mesure en analysant et rapprochant les différents types de signaux générés par les événements sismiques. La mission InSight, dont l'instrument principal est le sismomètre SEIS, est l'aboutissement de cette approche[1].
Historique du projet : une mission consacrée à l'étude sismique de Mars
[modifier | modifier le code]


Sélection d'InSight, douzième mission du programme Discovery
[modifier | modifier le code]InSight est à l'origine une proposition de mission spatiale pour le programme New Frontiers de l'agence spatiale civile américaine, la NASA. Ce programme regroupe des projets d'environ 1 milliard US$. La proposition avait pour objectif de poser sur le sol martien trois engins similaires à l'atterrisseur Phoenix pour établir un réseau de stations fixes, afin de mener une étude géophysique coordonnée de la planète Mars. Le projet n'ayant pas été retenu, il est remodelé, en supprimant deux des trois engins prévus, pour pouvoir être proposé dans le cadre du programme Discovery, tout en entrant dans l'enveloppe financière deux fois plus faible des missions de ce programme[3].
En , la NASA lance un appel à propositions pour sélectionner la douzième mission du programme Discovery. L'agence spatiale reçoit 28 propositions et sélectionne en trois d'entre elles. InSight, proposée par le Jet Propulsion Laboratory (JPL) avec la participation d'équipes scientifiques de plusieurs pays, fait partie des projets retenus. Les deux autres missions pré-sélectionnées sont[4] :
- Titan Mare Explorer (TiME) : c'est la première mission d'exploration directe d'un environnement océanique extraterrestre, en amerrissant et en flottant sur une mer d'éthane et de méthane liquide de Titan, la lune de Saturne ;
- Comet Hopper (CHopper) : c'est une sonde spatiale qui doit effectuer plusieurs atterrissages à la surface d'une comète et étudier les changements provoqués par le Soleil lors de son passage à son périhélie.
Les trois équipes finalistes reçoivent chacune trois millions de dollars pour réaliser une étude de conception détaillée. En , la NASA choisit sur la base de ces documents InSight. Le lancement est planifié pour . Conformément au cahier des charges du programme Discovery, la mission sélectionnée a un budget plafonné à 425 millions de dollars, hors coût de lancement[5] ,[6]. InSight était baptisée initialement GEMS (Geophysical Monitoring Station pour Station de surveillance géophysique), mais son nom est modifié début 2012, pour éviter une confusion avec l'observatoire spatial rayons X GEMS (Gravity and Extreme Magnetism SMEX), en cours de développement à la NASA[7].
Construction de la sonde spatiale
[modifier | modifier le code]En , la NASA sélectionne comme lanceur une fusée Atlas V 401, qui doit décoller depuis la base de Vandenberg en Californie[8]. La fourniture du sismomètre SEIS par une équipe pilotée par le CNES, l'agence spatiale française, est formalisée le [9]. Parmi les trois autres expériences scientifiques embarquées, l'instrument HP3 est fourni par l'Agence spatiale allemande DLR, tandis que la station météorologique TWINS est fournie par l'Espagne. Ce choix massif d'une instrumentation étrangère, qui permet de réduire le budget, car leur coût n'est pas compté dans l'enveloppe budgétaire prise en charge par la NASA (les instruments sont financés par les différents pays contributeurs), soulève un tollé dans la communauté scientifique américaine. En réponse à cette réaction, la NASA introduit en 2014 une nouvelle règle dans la sélection des missions du programme Discovery. Celle-ci impose qu'au moins les deux tiers des instruments embarqués devront être américains[10]. Le , le projet passe avec succès la « Revue Critique de Définition »[11]. La construction de la sonde spatiale débute chez les différents participants du projet[12]. La phase d'assemblage s'engage dès à Denver, chez le constructeur Lockheed Martin[13]. En , commence la phase de tests de l'atterrisseur, qui doit durer sept mois[14].
Report du lancement de 2016 à 2018
[modifier | modifier le code]Le , le constructeur français de l'instrument principal, le sismomètre SEIS, annonce qu'il n'arrive pas à régler les problèmes d'étanchéité de l'enceinte placée sous vide dans laquelle celui-ci est enfermé. Les tests qui avaient été réalisés avec succès à température ambiante, échouent lorsque la température descend à −100 °C. La fuite est localisée au niveau du passe-fils permettant de relier l'instrument à la sonde spatiale. Cette fuite est très faible, mais ne permet pas de respecter les contraintes nécessaires pour la précision des mesures[15]. Le lancement, planifié en , doit alors être reporté[16]. Le coût du report pour la NASA (maintien des équipes, opérations de stockage/déstockage) est évalué à 150 millions de dollars, entièrement pris en charge par la NASA. Bien que le coût résultant dépasse l'enveloppe budgétaire attribuée aux missions du programme Discovery, la NASA décide de poursuivre le projet. Le JPL prend en charge le développement d'une nouvelle enceinte. InSight doit donc utiliser la fenêtre suivante de lancement vers Mars, qui s'ouvre le [17],[18]. Des tests sont poursuivis pour s'assurer que les capteurs VLB de l'instrument SEIS, qui jouent un rôle capital dans la tenue des objectifs scientifiques et qui présentent un risque modéré, pourront fonctionner sur toute la durée de la mission primaire. Le report de la date de lancement est mis à profit pour modifier les connexions électriques à l'intérieur de la tête de la foreuse de l'instrument HP3, car les tests effectués ont montré une dégradation de celles-ci. Le projet décide d'abandonner le recours au nouveau type de nylon utilisé pour les suspentes du parachute, développé pour la mission Mars 2020 et de revenir au matériau mis en œuvre par la mission Phoenix. Il s'est avéré en effet que les opérations de stérilisation imposées par les règles de protection planétaire dégradaient la résistance du nouveau matériau[19].
Coût de la mission
[modifier | modifier le code]Le coût de la mission pour la NASA est de 814 millions de dollars américains dont 160 millions pour le lancement. Ce budget englobe la conception, la fabrication, le lancement vers Mars et la gestion des opérations durant la mission primaire, d'une durée de deux ans. Il faut ajouter à cette somme les contributions des principaux partenaires européens, la France et l'Allemagne, qui ont consacré en tout 180 millions de dollars au développement des instruments SEIS et HP3. Enfin, le JPL et la NASA ont investi environ 18,5 millions de dollars dans le développement de deux nano-satellites Mars Cube One[20].
- Assemblage de la sonde spatiale
-
 Le plateau supérieur de l'atterrisseur, sur lequel est installée l'instrumentation scientifique jusqu'à l'atterrissage.
Le plateau supérieur de l'atterrisseur, sur lequel est installée l'instrumentation scientifique jusqu'à l'atterrissage. -
 Assemblage du compartiment du parachute et de l'atterrisseur.
Assemblage du compartiment du parachute et de l'atterrisseur. -
 Le bouclier thermique arrière est abaissé sur l'atterrisseur et le compartiment parachute.
Le bouclier thermique arrière est abaissé sur l'atterrisseur et le compartiment parachute.



Objectifs scientifiques
[modifier | modifier le code]
L'objectif principal d'InSight est d'étudier la structure interne de la planète Mars, qui partage de nombreuses caractéristiques avec les trois autres planètes telluriques (c'est-à-dire rocheuses) de notre Système solaire. Comme la Terre, Mars résulte de l'accrétion initiale de nombreux corps rocheux, qui a été suivie, lorsque la masse du corps en formation a dépassé une taille suffisante, d'un échauffement interne, entretenu par la chaleur dégagée du fait de la radioactivité naturelle de certains éléments. Cet échauffement a déclenché un processus de différenciation planétaire : les matériaux les plus denses se sont enfoncés vers le centre, tandis que les matériaux moins denses migraient vers la surface. Il en est résulté la formation d'un noyau planétaire, entouré d'un manteau et d'une croûte. Mars présente l'avantage par rapport à la Terre d'être géologiquement moins active (notamment absence de plaques tectoniques). Sa structure interne doit donc avoir conservé les traces de ce processus initial de formation. En étudiant la taille, l'épaisseur, la densité et l'ensemble de la structure de la planète Mars — noyau, manteau et croûte —, ainsi qu'en permettant d'estimer la vitesse à laquelle la chaleur s'échappe de l'intérieur de la planète, InSight fournira un aperçu original des processus évolutifs de toutes les planètes rocheuses, qui ont débuté il y a plus de quatre milliards d'années[21].
L'objectif secondaire de la mission est de mener une étude approfondie de l'activité tectonique, mais aussi des impacts de météorites sur Mars, ce qui pourrait accroître nos connaissances sur les processus similaires sur Terre[21].
Pour remplir sa mission, InSight doit collecter des données qui permettront d'effectuer six types de mesure[21] :
- déterminer la taille, la composition et l'état (solide ou liquide) du noyau planétaire ;
- déterminer l'épaisseur et la structure de la croûte ;
- déterminer la composition et la structure du manteau ;
- déterminer l'état thermique des structures internes de Mars ;
- mesurer la force, la fréquence et la distribution géographique de l'activité sismique interne de la planète ;
- mesurer la fréquence des impacts de météorites à la surface de Mars.
Les principales caractéristiques de la structure interne de Mars ont fait l'objet d'estimations, mais souvent de manière indirecte. La mission InSight devrait apporter des précisions très importantes, comme le montre le tableau ci-dessous.
| Caractéristique | Valeur connue / imprécision | Précision attendue d'InSight | Facteur d'amélioration |
|---|---|---|---|
| Épaisseur de la croûte | 65 ± 35 km (déduit) | ±5 km | 7× |
| Couches composant la croûte | pas d'information | identification des couches d'une épaisseur > 5 km | nouvelles données |
| Vitesse de déplacement du manteau | 8 ± 1 km/s (déduit) | ±0,13 km/s | 7,5× |
| Noyau liquide ou solide | sans doute liquide (déduit) | déterminé avec certitude | nouvelles données |
| Rayon du noyau | 1 700 ± 300 km | précision portée à ±75 km | 4× |
| Densité du noyau | 6,1 ± 1,0 g/cm3 | précision portée à ±0,3 g/cm3 | 3× |
| Flux thermique | 30 ± 25 mW/m3 (déduit) | précision portée à ±0,3 mW/m3 | 8× |
| Activité sismique | imprécision d'un facteur 100 | facteur 10 | 10× |
| Localisation des séismes | pas d'information | localisés avec une précision inférieure ou égale à 10° | nouvelles données |
| Taux d'impact des météorites | imprécision d'un facteur 6 | facteur 2 | 3× |
Évaluation de l'activité sismique de Mars
[modifier | modifier le code]Aucune des deux missions martiennes dotées de sismomètres ayant précédé InSight n'a pu fournir d'informations sur l'activité sismique de Mars, du fait de la défaillance des instruments (Viking) ou de l'échec du lancement (Mars 96). L'activité sismique a fait néanmoins l'objet, pour la mission InSight, d'une évaluation basée sur plusieurs éléments : la masse de la planète, ses oscillations autour de son axe, l'observation des failles et des impacts de météorites à sa surface, ainsi que des modélisations du processus ayant donné naissance à la planète et qui a conduit à son refroidissement progressif. La source principale de l'activité sismique est la contraction de la planète liée au refroidissement de son noyau (séisme tectonique). Le moment cinétique libéré chaque année par ce processus aurait une valeur comprise entre 1017 et 1019 N m, qui situe Mars entre la Terre (1022 N m) et la Lune (1015 N m). Une large incertitude entoure également le nombre de séismes, il n'y a pas de modèle unique de distribution des séismes en fonction de leur intensité. À partir de plusieurs hypothèses, les spécialistes du domaine estiment qu'environ 100 séismes par an sont détectables au niveau du site d'atterrissage, c'est-à-dire caractérisés par un moment cinétique supérieur à 1013 N m, et par un épicentre situé à moins de 60 degrés d'écart sur la surface. Des sources secondaires de séismes sont les impacts de météorites. Ce type d'événement présente un grand intérêt scientifique car, contrairement aux séismes tectoniques, leur épicentre devrait pouvoir être localisé par les observations des engins spatiaux en orbite autour de Mars. Cette localisation permet de réduire l'incertitude concernant les déductions faites sur la structure interne de Mars à partir de ces ondes sismiques relevées. Le nombre d'impacts qui seront détectables chaque année présente de grandes incertitudes. Le responsable scientifique de l'instrument SEIS a proposé le chiffre de 10 événements détectables par an[23].

Détection des impacts météoritiques
[modifier | modifier le code]Une des applications secondaires d'InSight est la détection des impacts de météorites, appliquée à l'étude de la structure interne de la planète[24]. Le , Insight a enregistré un séisme de magnitude 4, qui s'est révélé causé par un impact de météorite[25], identifié visuellement seulement deux mois plus tard, sur des images de Mars Reconnaissance Orbiter (MRO). L'impact, situé dans la région Amazonis Planitia, a créé un cratère de 150 m de diamètres et 20 m de profondeur, pour un météorite estimé à 5 à 12 mètres de diamètre.
Parmi le millier de séismes enregistré par InSight, quatre sont pour l'instant attribués à des impacts météoritiques et celui du est considéré comme le plus important, mais surtout le seul à avoir créé des ondes de surface dans la partie supérieure de la croûte, dont l'exploitation des données a permis d'étudier mieux encore la structure de la croûte[26],[27].
Sélection du site martien
[modifier | modifier le code]
Le site d'atterrissage retenu prend en compte les besoins scientifiques, mais également les capacités de l'atterrisseur. En ce qui concerne ce dernier critère, l'objectif est de garantir une probabilité de réussite de l'atterrissage de 99 %. Les critères de sélection du site suivants sont définis[28] :
- la latitude du site d'atterrissage doit être comprise entre 15°S et 5°N, pour que les panneaux solaires puissent fournir suffisamment d'énergie ;
- l'altitude doit être inférieure à −2,5 kilomètres (par rapport au niveau moyen de la surface martienne), pour que la sonde spatiale parvienne à être ralentie suffisamment avant l'arrivée sur le sol, compte tenu de sa capacité de freinage (puissance et carburant disponible pour les rétrofusées, forces de traînée) ;
- la zone d'atterrissage, dégagée d'incidents de terrain (listés ci-dessous), doit être suffisamment étendue pour prendre en compte l'absence de précision de la trajectoire de descente vers le sol de la sonde spatiale, compte tenu des incertitudes sur la densité de l'atmosphère ainsi que la force et la direction des vents. L'ellipse retenue doit faire au minimum 110 sur 25 kilomètres ;
- l'inertie thermique du sol, mesurée depuis une orbite supérieure, doit être d'environ 100–140 J m−2 K−1 s−½. Cette contrainte garantit que le sol ne sera pas trop mou. L'ordre de grandeur idéal est de 200 J m−2 K−1 s−½, valeur qui caractérise des terrains régolithiques peu ou pas indurés ;
- les rochers éparpillés en surface ne doivent pas représenter plus de 10 % de la surface, pour que l'atterrissage et le déploiement des panneaux solaires puissent s'effectuer correctement ;
- la zone d'atterrissage doit être dépourvue de reliefs de grande taille et ne comporter que des pentes inférieures à 15 % ;
- le régolite doit avoir au moins cinq mètres d'épaisseur, pour faciliter la pénétration du sondeur HP3, d'une longueur de 5 mètres.


La sélection du site est effectuée en utilisant, d'une part les mesures des caractéristiques thermiques du sol réalisées par l'instrument THEMIS de l'orbiteur Mars Odyssey, d'autre part les images prises par la caméra HiRISE de Mars Reconnaissance Orbiter dont la résolution permet d'identifier les rochers de grande taille. Peu de régions martiennes répondent aux critères de latitude, tout en se trouvant en dessous de l'altitude préconisée. En éliminant les terrains trop rocheux (comme Valles Marineris), l'équipe scientifique identifie une seule région éligible, située dans la plaine Elysium Planitia. Dans cette zone, vingt ellipses d'atterrissage, répondant aux critères d'inertie thermique, sont identifiées dans un premier temps. Après une étude plus approfondie, la sélection est réduite à quatre zones, comprises entre 3° et 5° de latitude nord et entre 134° et 140° de longitude est. Les sites choisis ne permettent toutefois pas d'éviter les risques subsistants dus aux roches ou à des pentes trop fortes de cratères secondaires. Le risque d'un échec de la mission résultant d'inégalités de terrain dans la zone d'atterrissage est évalué à 1,4-2,2 %[29]. Début , le site d'atterrissage est sélectionné[30]. Le site d'atterrissage final forme une ellipse s'étendant sur 130 km d'ouest en est et sur 27 km du nord au sud. Le centre de cette ellipse se situe à la latitude 4,5°N et à la longitude 135,9°E. La probabilité d'un atterrissage à l'intérieur de l'ellipse est évaluée à 99 %[31].
Équipe scientifique
[modifier | modifier le code]L'équipe scientifique chargée de la conception de la mission et des instruments d'InSight comprend des scientifiques de plusieurs pays : États-Unis , France, Allemagne, Autriche, Belgique, Canada, Pologne, Japon, Suisse et Royaume-Uni. Bruce Banerdt[32] est le responsable scientifique (Principal Investigator ou PI) du projet. Ce géophysicien planétaire a une longue carrière consacrée à l'étude des processus qui modifient la surface des planètes. Suzanne Smrekar[33], dont les recherches portent sur l'évolution thermique des planètes et qui a contribué au développement et au test de nombreux instruments conçus pour mesurer les propriétés thermiques et les flux de chaleur sur d'autres planètes, est la responsable scientifique adjointe. Philippe Lognonné, de l'Institut de physique du globe de Paris et de l'université Paris-Diderot, spécialiste en sismologie planétaire, est le responsable scientifique du sismomètre SEIS[34]. Tlman Spohn, spécialiste en géodynamique planétaire, est le responsable scientifique de l'expérience de flux de chaleur HP3. Sami Asmar, un spécialiste des ondes radio[35], est le responsable de l'instrument RISE. Le projet est piloté par le centre JPL, représenté par Tom Hoffman, assisté par Henry Stone[36].
Lancement, transit et atterrissage d'InSight sur Mars
[modifier | modifier le code]


Lancement ()
[modifier | modifier le code]Le lancement d'un engin spatial vers Mars ne peut avoir lieu de manière optimale que tous les 26 mois, lorsque la Terre et Mars sont positionnées l'une par rapport à l'autre d'une manière favorable. En 2018, la fenêtre de lancement vers Mars s'ouvre le et se referme le . Durant cette période, le créneau quotidien permettant un décollage dure environ deux heures. InSight est la première sonde spatiale lancée depuis la base de lancement de Vandenberg. Depuis ce site, le lancement, qui doit obligatoirement se faire vers l'ouest, ne bénéficie pas comme à Cape Canaveral en Floride de la vitesse de rotation de la Terre. Ce choix étonnant fait par la NASA résulte du fait que le lanceur dispose d'une réserve de puissance suffisante pour compenser ce handicap (la sonde spatiale est relativement légère) et que par ailleurs le nombre élevé de lancements en Floride aurait créé des contraintes sur le déroulement du lancement. Quel que soit le jour de lancement, l'atterrissage aura lieu le , du fait des lois de la mécanique spatiale. Le lanceur est l'Atlas V 401, version la moins puissante de cette famille de fusées[b]. La sonde spatiale est placée sous une coiffe de 3,7 mètres de diamètre, dont le gabarit est donc suffisant pour que les panneaux solaires de l'étage de croisière puissent être en position déployée dès le lancement[37].
Le lancement d'InSight a lieu dès l'ouverture de la fenêtre le (11 h 5 UTC). Le premier étage fonctionne durant 244 secondes puis 16 secondes après son extinction, l'étage Centaur prend le relais. Celui-ci place la sonde spatiale sur une orbite de parking quasi circulaire, à 185 kilomètres d'altitude. Après une phase de navigation inertielle (sans propulsion) d'environ 60 minutes, l'étage Centaur est rallumé pendant environ cinq minutes, pour donner à la sonde spatiale une vitesse suffisante lui permettant d'entamer son transit vers Mars. Une fois que InSight s'est séparée du lanceur, les deux nano-satellites MarCO sont largués à leur tour et entament de manière autonome leur propre transit vers Mars[38].
Transit vers Mars (mai-)
[modifier | modifier le code]Le transit vers Mars est de type 1, c'est-à-dire que la sonde spatiale effectue moins d'une demi-orbite autour du Soleil. Le trajet doit durer 205 jours. La sonde spatiale suit une orbite de Hohmann, qui lui fait parcourir 485 millions de kilomètres, alors que Mars se trouve à 121 millions de kilomètres de distance au moment du lancement. Durant son vol, la sonde spatiale est stabilisée 3 axes (son orientation est fixe). Six manœuvres de correction de trajectoire sont prévues durant le transit, pour permettre à la sonde spatiale d'arriver précisément à destination. Celles-ci sont réalisées à l'aide de quatre moteurs-fusées fixés sur l'atterrisseur, mais dont la tuyère émerge par des orifices dans le bouclier arrière. Quatre autres petits moteurs-fusées, couplés aux propulseurs précédents, sont utilisés pour corriger l'orientation lorsque les gyroscopes embarqués et les viseurs d'étoiles installés sur l'étage de croisière détectent une déviation par rapport à l'orientation souhaitée. Les deux premières corrections de trajectoire sont programmées le et le . Leur objectif est de corriger l'erreur introduite volontairement dans la direction initiale prise par la sonde spatiale afin d'éviter que l'étage Centaur, qui suit la même trajectoire, ne s'écrase sur le sol de Mars et ne vienne la contaminer avec des micro-organismes terrestres. Les trois autres corrections de trajectoire, programmées 45 jours, 15 jours et 22 heures avant l'arrivée sur Mars doivent permettre d'affiner celle-ci pour poser InSight précisément dans la région de Mars visée[39],[40].
Rentrée atmosphérique et atterrissage ()
[modifier | modifier le code]47 minutes avant le début de la rentrée atmosphérique, des résistances sont mises en marche pour réchauffer les catalyseurs utilisés par le système de propulsion. 40 minutes plus tard, l'étage de croisière, qui a achevé sa mission, est largué. La sonde spatiale est désormais constituée de l'atterrisseur, enfermé dans son bouclier thermique. Trente secondes plus tard, InSight modifie son orientation, de manière à présenter vers l'avant de sa trajectoire en direction de la planète le bouclier thermique avant, le mieux protégé contre la chaleur. L'émetteur radio commence à transmettre des données sur le fonctionnement de la sonde spatiale en UHF (avec un débit de 8 kilobits par seconde), par le biais d'une antenne patch fixée sur le bouclier arrière. Les données transmises doivent permettre de vérifier le déroulement de la phase critique de la descente et, si un incident se produit, fournir les paramètres susceptibles de l'expliquer. Ces signaux sont captés à la fois par l'orbiteur martien Mars Reconnaissance Orbiter, déjà en poste, et par les nano-satellites MarCO, lancés avec InSight. Ces derniers retransmettent les données émises en temps réel vers la Terre, tandis que MRO les transmettra par la suite. Sur Terre, trois radiotélescopes sont mobilisés durant le déroulement de la descente sur le sol martien, pour recevoir les données qui arrivent avec un décalage de huit minutes, proportionnel à la distance que le signal doit parcourir[40],[41].
InSight pénètre dans l'atmosphère martienne à une vitesse de 5,5 kilomètres par seconde. La chaleur produite par le frottement de l'atmosphère de Mars, pourtant très peu épaisse, porte le bouclier thermique avant à une température qui, 90 secondes après le début de la rentrée, culmine à 1 500 °C. Dix-sept secondes plus tard, la décélération causée par la friction de l'atmosphère atteint un pic à 9 g. Le signal radio est interrompu un court moment, à cause de l'ionisation des gaz provoquée par l'échauffement. L'ouverture du parachute s'effectue environ 3,5 minutes après le début de la rentrée atmosphérique alors qu'InSight ne se situe plus qu'à 13 kilomètres au-dessus du sol et que sa vitesse a chuté à 446 mètres par seconde. La vitesse de la rentrée a déjà été réduite de 9/10e. Le déploiement du parachute entraîne une brutale décélération. Dix secondes plus tard, l'ordinateur embarqué déclenche la phase finale de la descente : le radar et une batterie auxiliaire destinée à renforcer la batterie principale durant la phase critique de l'atterrissage sont mis en marche. InSight va descendre sous son parachute durant trois minutes. Au cours des 25 premières secondes, il éjecte son bouclier thermique avant, puis déplie son train d'atterrissage, qui était jusque-là en position repliée. Le radar est ensuite utilisé pour déterminer la distance au sol. Lorsque la vitesse de descente n'est plus que de 60 mètres par seconde, la sonde spatiale largue à la fois son parachute et le bouclier thermique arrière. Elle ne se trouve plus qu'à 1 200 mètres du sol et sa vitesse de descente a chuté à 60 mètres par seconde (200 km/h). Les communications passent désormais par l'antenne UHF installée sur le pont supérieur de l'atterrisseur. Les 12 moteurs-fusées sont mis en marche, pour poser en douceur l'atterrisseur. À une altitude de 50 mètres au-dessus du sol, la vitesse de descente est stabilisée à 2,4 mètres par seconde et une trentaine de secondes plus tard, l'atterrisseur touche le sol à cette vitesse (8,6 km/h)[40],[41].
| Phase | Heure | Événement | Altitude | Vitesse | |
|---|---|---|---|---|---|
 |
Préparation de la rentrée atmosphérique |
E-3 h. | Mise à jour des paramètres de rentrée | ||
| E-10 min | Initialisation de la phase de rentrée | ||||
| E-7 min | Largage de l'étage de croisière | ||||
| E-6,5 min | Orientation de rentrée | ||||
| Phase hypersonique | E | Début de la rentrée atmosphérique |
143 km | 5,5 km/s | |
| E+218 s. | Déploiement du parachute | 13 km | Mach 1,66 | ||
| Phase sous parachute | E+233 s. | Largage du bouclier thermique | 11 km | 485 km/h | |
| E+243 s. | Déploiement du train d'atterrissage | ||||
| E+276 s., T-119 s. | Activation du radar | 7 km | |||
| T-60 s. | Premier écho radar | 2,7 km | |||
| Phase terminale de la descente |
T-41 s. | Largage du parachute | 1,3 km | 250 km/h | |
| T-38 s. | Changement d'orientation | 1,1 km | |||
| T-16 s. | Descente à vitesse constante | 52 m. | 31 km/h | ||
| Atterrissage | T | Atterrissage | 0 m. | verticale = 10 km/h horizontale < 5,7 km/h | |
| < T +15 min | La poussière s'est reposée | ||||
| T+5 min | Détermination de la position | ||||
| T+32 min | Déploiement des panneaux solaires | ||||
| E = heure début rentrée atmosphérique - T = heure atterrissage . Remarque : les conditions atmosphériques martiennes peuvent modifier la durée de la descente. | |||||
Retransmission des données par les CubeSats MarcO
[modifier | modifier le code]

Deux gros CubeSats expérimentaux baptisés MarCO (pour Mars Cube One[43]) ont été lancés avec InSight. Ils ont effectué un transit autonome vers Mars mais ne disposent pas de capacité de mise en orbite. Durant leur survol de Mars, ils ont assuré à titre expérimental le rôle de relais entre InSight et la Terre pour la phase d'atterrissage de la sonde spatiale permettant de disposer en quasi temps réel (compte tenu du délai imposé par la distance de la Terre et de Mars) du statut de la sonde spatiale aux moments clés de la descente ainsi que d'une première photo prise immédiatement après l'arrivée sur le sol martien. Le transfert des données est assuré en parallèle par l'orbiteur martien MRO mais avec un décalage de plusieurs heures. Les deux nano-satellites doivent par la suite poursuivre leur vol autour du Soleil. Chaque CubeSat a la forme d'un parallélépipède de 36,6 × 24,3 × 11,8 cm3. Ils disposent de deux panneaux solaires et de deux antennes, qui sont déployés en orbite. La charge utile est constituée par un émetteur/récepteur fonctionnant en UHF (réception) et en bande X (émission et réception). L'antenne utilisée pour les émissions en bande X est une antenne plate, qui permet de diriger les émissions, comme une antenne parabolique[44].
Déroulement de la mission sur le sol martien
[modifier | modifier le code]
Activation de la sonde spatiale au sol ( - )
[modifier | modifier le code]Une fois au sol, le premier objectif est d'activer et de vérifier les équipements de l'atterrisseur et de déployer les deux instruments principaux sur le sol. Il est prévu que cette phase dure environ 67 jours, avec une marge de 20 jours. Il faut ensuite sept semaines supplémentaires pour que la sonde thermique soit enfoncée jusqu'à la profondeur souhaitée de trois à cinq mètres. Durant cette phase, les orbiteurs permettent de retransmettre des données vers la Terre deux fois par jour, tandis que des commandes sont transmises directement par le centre de contrôle à InSight, en bande X[40].
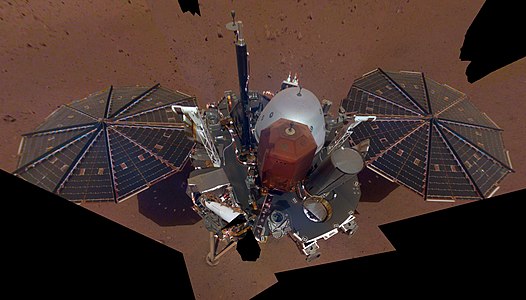
Les opérations à la surface de Mars démarrent une minute seulement après l'atterrissage. Les opérations du premier jour sont exécutées automatiquement sans intervention du contrôle au sol. Depuis le début de la descente vers le sol, InSight puise son énergie sur ses batteries ; aussi la première action à l'arrivée sur le sol martien consiste à déployer les panneaux solaires. Cette opération est réalisée seize minutes après l'atterrissage, le temps de laisser la poussière soulevée retomber. L'énergie produite par les panneaux solaires est mesurée : avec 4 588 Wh (wattheures) par jour martien, InSight bénéficie d'une quantité d'énergie suffisante pour ses activités et largement supérieure à ce dont ont disposé tous les engins martiens l'ayant précédé (Phoenix 1 800 Wh, Curiosity (2 806 Wh), Mars Exploration Rover (922–994 Wh). Les données collectées par le centre de contrôle indiquent que l'atterrisseur s'est posé dans un petit cratère d'impact rempli de poussière et de sable et que l'inclinaison de l'atterrisseur est de 4° (la valeur maximale acceptable était de 15° pour ne pas gêner le déploiement des panneaux solaires). Les premières images prises, alors que le cache translucide anti-poussières n'a pas encore été éjecté, montrent un terrain très peu accidenté, parsemé seulement de quelques petits rochers, idéal pour l'installation des deux instruments scientifiques[45].
Le bras, qui est utilisé pour déployer les instruments, est débloqué, et le il est étendu pour permettre d'effectuer des photos de l'environnement immédiat avec la caméra IDC fixée sur son "coude". L'objectif de l'autre caméra (caméra de contexte) fixée au bord du plateau supérieur, malgré la présence d'un cache, est recouvert de poussières martiennes qui se sont glissées sur l'objectif. Malgré ce défaut les images effectuées restent exploitables[46].
Pour la première fois, le bruit du vent qui souffle à une vitesse comprise entre 18 et 25 km/h est enregistré et transmis au sol. En fait InSight ne dispose pas de microphone[c] pour ce son non perceptible par un humain[d]. Il est produit par la conversion des vibrations des panneaux solaires générées par le vent et enregistrées par le capteur courte période du sismomètre installé provisoirement sur le plateau supérieur d'InSight. Ces infrasons produits par le vent sont également enregistrés par le capteur de pression de la suite météorologique et leur conversion effectuée pour pouvoir être perceptible par l'oreille humaine[47],[48].
Déploiement du sismomètre
[modifier | modifier le code]
Au cours de la première semaine de son séjour sur Mars, InSight collecte des données avec ses caméras, pour préciser les caractéristiques de la surface, en particulier au sud de l'atterrisseur sur la portion de terrain à portée de son bras. Les deux semaines suivantes, des photos complémentaires de la zone à portée du bras sont prises pour sélectionner la partie du terrain sur laquelle seront posés les deux instruments. Des photos en stéréo sont prises pour mieux analyser les reliefs du terrain[40],[49]. L'analyse des images prises par la caméra d'InSight et par l'instrument HIRISE de l'orbiteur Mars Reconnaissance Orbiter lors d'un survol du site d'atterrissage indiquent que l'atterrisseur s'est posé sur une zone particulière plate, dépourvue de grosses roches. InSight est au centre d'un cratère très peu profond (sans doute moins de un ou deux mètres) qui a été comblé par du sable. Sous cette couche de sable se trouve du régolithe. Le socle de roches commencerait à dix ou douze mètres de profondeur[e]. Cette composition du sol est idéale pour l'installation de la sonde HP3 qui doit être enfoncée à plusieurs mètres de profondeur. À l'aide des relevés effectués les techniciens du JPL ont reconstitué dans le laboratoire ISIL (In Situ Instrument Laboratory) le terrain sur lequel InSight est posé pour mettre au point la séquence d'opérations de dépose des instruments[50].
Le sismomètre SEIS est le premier instrument installé. Le transfert est réalisé en plusieurs jours afin de vérifier le bon fonctionnent du bras et s'assurer que le sismomètre a été bien saisi par celui-ci. C'est la première fois qu'un instrument est installé par un bras télécommandé sur le sol d'une autre planète. Après avoir vérifié le fonctionnement du bras chargé de déployer les instruments sur le sol martien, les opérateurs envoient le à la sonde spatiale une série de commandes à exécuter pour réaliser la dépose du sismomètre SEIS. Celles-ci sont exécutées le au moment du coucher du Soleil pour des raisons thermiques[f]. Le sismomètre est placé sur le sol à environ 1,63 mètre de l'atterrisseur, distance maximale que peut atteindre le bras. Le sol présente à cet endroit une pente de deux à trois degrés et, pour fonctionner, le sismomètre doit être dans une position la plus proche possible de l'horizontale. Pour remplir cet objectif les trois pieds sur lesquels repose l'instrument sont réglables en hauteur à l'aide de moteurs électriques. Ce réglage doit intervenir au cours des jours suivants. Ensuite, quelques semaines doivent permettre de vérifier que les données collectées sont les plus claires possibles. Les contrôleurs pourront durant cette phase modifier la position du câble reliant l'instrument à l'atterrisseur pour limiter le bruit qui pourrait circuler le long de celui-ci. Début janvier la cloche assurant la protection thermique et éolienne du sismomètre est saisie par le bras sur le plateau supérieur et installée de manière à recouvrir le sismomètre dans le but de le protéger des phénomènes météorologiques[51].
- Opérations de déploiement du sismomètre photographiées par la caméra IDC
-
 Le bras robotique en position repliée.
Le bras robotique en position repliée. -
 Un des panneaux solaires déployés.
Un des panneaux solaires déployés. -
 Vue globale de la sonde.
Vue globale de la sonde.



Déploiement avorté de l'instrument HP3
[modifier | modifier le code]

Une fois le sismomètre SEIS opérationnel, les opérateurs déposent l'instrument HP3 sur le sol à l'aide du bras de la sonde spatiale. Pour que l'instrument de mesure des flux de chaleur puisse fonctionner il faut enfoncer un tube long d'environ 40 centimètres jusqu'à une profondeur de cinq mètres. Cette opération dure plusieurs semaines, avec des pauses de deux à trois jours durant lesquelles on laisse la chaleur produite par le processus se dissiper, puis on mesure la conductivité thermique. Le tube s'enfonce sous l'action d'une masse en tungstène qui coulisse à l'intérieur entre deux ressorts et qui est mise en mouvement par un moteur électrique[52],[53].
Les opérations de forage débutent le , 92 jours après l'atterrissage sur Mars. Le tube s'enfonce aux trois quarts dans le sol mais sa progression est rapidement stoppée. Les opérations reprennent le , mais le tube ne parvient pas à s'enfoncer plus avant et est désormais incliné d'environ 15 degrés par rapport à la verticale. Une pause dans les opérations est décidée pour tenter de déterminer la nature du problème à partir des données disponibles et en effectuant des tests sur Terre avec une copie de l'instrument. La source du blocage fait l'objet de plusieurs hypothèses : le tube est arrêté par une roche, ou la nature du sol trop élastique annule les effets du mouvement du bloc de tungstène, ou le mécanisme de déroulement du câble situé à l'intérieur de l'instrument est gêné par un objet non identifié[54].
Début juin la NASA et la DLR définissent une nouvelle stratégie pour tenter de régler le problème. La présence d'un caillou bloquant l'enfoncement est considéré comme peu probable (quelques pourcents). La stratégie définie part de l'hypothèse que le tube ne s'enfonce pas parce que les forces de frottement exercées par le sol sur celui-ci ne sont pas suffisantes pour empêcher le tube de rebondir après chaque impact du bloc de tungstène. Le sol sur le site d'atterrissage a une consistance différente de ce qui a été constaté ailleurs sur Mars et les simulations effectuées sur Terre pour la mise au point de l'instrument, basées sur la nature de ces sols, n'ont pas pu reproduire le comportement constaté. Le phénomène est aggravé par la faiblesse de la gravité martienne. Pour tenter de corriger le problème la NASA décide de soulever délicatement l'instrument sans déplacer le tube enfoncé sur les trois quarts de sa longueur dans le sol (30 cm sur 40), car il ne serait pas possible de le replacer dans le forage existant. Cette opération a lieu début . Les images du tube et du sol prises après le déplacement de l'instrument dévoilent que le tube bute sur un obstacle qu'il ne parvient pas à franchir et que ces martèlements infructueux ont élargi la partie supérieure du forage. Les scientifiques estiment que le tube a rencontré une couche de régolithe beaucoup plus résistante de cinq à dix centimètres d'épaisseur. La pelle solidaire du bras est alors utilisée pour compresser le sol autour du forage afin d'accroître les forces de frottement que subit le tube, ce qui doit rendre les percussions effectuées plus efficaces[55],[56],[57]. Le les opérations de percussion reprennent : la masse en tungstène coulisse 220 fois et les photos prises quelques jours plus tard semblent indiquer que le tassement préalable a permis de débloquer la situation. Le tube s'est enfoncé de 2 à 3 centimètres. Mais le , les images montrent que le tube, dont l'extrémité supérieure se situait au niveau du sol, émerge désormais sur la moitié de sa longueur. L'équipe projet décide début novembre d'effectuer une nouvelle tentative de tassement du sol avec la pelle[58].
En , la NASA, qui estime avoir tout tenté, décide de renoncer à enfoncer la sonde dans le sol et à faire fonctionner l'instrument. Les scientifiques devront déterminer quelles sont les propriétés du sol martien à l'origine de cet échec[59].
Phase opérationnelle
[modifier | modifier le code]
La phase opérationnelle de SEIS, qui doit initialement durer deux ans, débute dès l'achèvement du déploiement. Les données recueillies sont régulièrement transmises en bande UHF aux orbiteurs martiens Mars Reconnaissance Orbiter et Mars Odyssey, qui survolent quotidiennement le site d'atterrissage. Ceux-ci relaient ensuite ces données en bande X aux stations de réception sur Terre : à tout moment une des trois grandes stations du Deep Space Network, équipées d'antennes paraboliques de 70 et 34 mètres de diamètre et situées en Espagne, en Californie et en Australie, est en position de recevoir des données transmises par les orbiteurs. Durant les premières semaines consacrées aux déploiement des instruments, deux sessions de communication ont lieu chaque jour pour donner le temps aux équipes sur Terre de préparer les activités du lendemain. Les commandes préparées par le centre de contrôle sont, quant à elles, envoyées directement à InSight en bande X. Ce mode de transmission ne permet qu'un débit relativement faible. Le deuxième emploi de ces communications directes est l'expérience RISE visant à mesurer les mouvements de Mars sur son axe[60].
Détection des premiers séismes
[modifier | modifier le code]Le sismomètre SEIS devient complètement opérationnel début . Un premier séisme est détecté le . C'est la première fois dans l'histoire de l'exploration de Mars qu'un phénomène de ce type est mesuré, 40 ans après la dépose d'un premier sismomètre à la surface de la planète par les sondes spatiales Viking. La secousse détectée par InSight est d'une amplitude très faible, ce qui ne permet pas la localisation de son épicentre. Trois autres événements enregistrés par les seuls détecteurs VBB (les plus sensibles) les , et restent de nature indéterminée[61]. À compter de , les données de SEIS sont mises à la disposition de la communauté scientifique et du public[62].
En , plus de 100 événements sismiques ont été enregistrés dont 20 sont considérés comme produits par une activité sismique. Deux séismes, plus intenses que celui du , ont lieu le (magnitude de 3,7) et le (magnitude de 3,3). Ils livrent des informations sur la croûte de Mars. Bien que son isolation par rapport à l'extérieur soit particulièrement poussée, le sismomètre, très sensible, enregistre par ailleurs de nombreux événements extérieurs : bourrasques de vent, mouvements du bras de l'atterrisseur, dilatation des composants du sismomètre due aux fortes variations de température entre le jour et la nuit[63].
Prolongement de la mission ()
[modifier | modifier le code]En , la mission InSight est prolongée de deux ans, jusqu’en [64].
Opération de réduction du bruit et pénurie d'énergie (1er semestre 2021)
[modifier | modifier le code]
En , l'instrument SEIS a enregistré 600 événements sismiques dont une dizaine majeurs, les deux derniers le . L'équipe scientifique attend toutefois toujours un séisme de forte intensité qui permettrait d'obtenir des informations sur la structure profonde de Mars. Compte tenu de la sensibilité des capteurs, malgré la cloche qui protège l'instrument, les mesures sont fortement perturbées par le vent qui souffle une grande partie de la journée, en particulier durant la mauvaise saison (par exemple, au deuxième semestre 2020). Une autre source de bruit est la dilatation thermique du câble qui relie l'instrument à l'atterrisseur sous l'effet des variations de température qui atteignent 100 °C entre le jour (température proche de 0 °C) et la nuit (−100 °C), dont 50 °C en une heure. Pour réduire cette source de perturbation des mesures, la NASA enterre le câble sous une couche de sol en utilisant la petite pelleteuse de l'atterrisseur[65]. L'empoussiérage progressif des panneaux solaires réduit l'énergie disponible. Mars se situe au point de son orbite le plus éloigné du Soleil en . À compter d'avril, la NASA prévoit d'éteindre progressivement tous les équipements (SEIS vers mai) en attendant que l'atterrisseur dispose à nouveau de suffisamment d'énergie pour les faire fonctionner[66].
La NASA décide en avril 2022 de prolonger huit de ses missions s'achevant fin 2022, dont InSight[67]. Mais les perspectives pour cette dernière sont mauvaises. En , les panneaux solaires complètement empoussiérés ne produisent plus que le dixième de la puissance fournie en début de mission (500 watts-heures par sol au lieu des 5 000 Wh d'origine). L'équipe projet espère le passage d'un tourbillon, qui en chassant les grains de poussière permettrait de rétablir au moins une partie des capacités des panneaux solaires, mais la probabilité d'un tel événement est de plus en plus faible. Compte tenu du niveau d'empoussiérage croissant, plus aucune opération scientifique ne sera possible à compter de la fin de l'été 2022 et l'astromobile ne sera plus en mesure de se maintenir en mode survie à compter de fin 2022[68]. C'est néanmoins durant cette période (le ) que le sismomètre SEIS détecte l'événement sismique le plus énergétique de toute la mission : ce tremblement de magnitude 5 est pour Mars d'une puissance exceptionnelle[69].
Le , la NASA annonce que la fin de la mission est proche. Les équipes n'arrivent plus à communiquer avec la sonde depuis le , à cause d'une alimentation électrique insuffisante[70]. La NASA annonce la fin de la mission le lendemain, après deux tentatives infructueuses d'entrer en contact avec la sonde[71].
Résultats scientifiques
[modifier | modifier le code]Les principaux résultats acquis au cours de la première année d'InSight sur Mars, publiés fin dans six articles scientifiques[g], sont les suivants[78],[79],[72]. Une estimation de la structure interne de la planète, un des principaux objectifs de la mission, fait l'objet de deux publications en .
Sismologie
[modifier | modifier le code]Les séismes martiens sont plus faibles mais plus fréquents que ne le prévoyaient les modèles théoriques. En 13 mois, SEIS a enregistré près de 460 événements, essentiellement des microséismes. Parmi ceux-ci, 40 sont des signaux de basse fréquence, correspondant à des séismes relativement profonds ; les autres sont des événements de haute fréquence, beaucoup plus superficiels et proches, d'origine encore imprécise (plausiblement de petits séismes superficiels, des glissements de terrain ou des micro-ébranlements de falaises). La magnitude des deux séismes les plus puissants est de 3,6, pas tout à fait assez pour atteindre le manteau inférieur ni le noyau. Leur épicentre est situé 1 600 km à l'est d'InSight, dans un secteur appelé Cerberus Fossae (en), l'une des régions volcaniques potentiellement actives de Mars (certaines coulées de lave montrent des signes de fractures dues à des séismes datant de moins de 2 Ma)[75].
Trois séismes, les plus puissants enregistrés jusque là par InSight, sont détectés sur un laps de temps d'un mois au cours de l'été 2021 : deux d'entre eux le (magnitudes de 4,2 et 4,1 sur l'échelle de Richter) et le troisième le (magnitude de 4,2). Ces tremblements sont détectés malgré la faible puissance fournie par les panneaux solaires du fait de la poussière accumulée et de l'éloignement du Soleil au moment de ces événements (Mars circule sur une orbite fortement elliptique). (Pour nettoyer en partie les panneaux solaires les opérateurs de la sonde spatiale avaient eu recours à une technique peu orthodoxe en accumulant près des panneaux solaires du régolithe avec le bras télécommandé de l'atterrisseur . Les grains de régolithe, soulevés par le vent ont balayé une partie de la poussière accumulée permettant aux panneaux solaires de recouvrer une partie de leur puissance)[80].
Le , InSight détecte un événement qui pourrait être un séisme de magnitude 5[81].
Géologie
[modifier | modifier le code]En analysant les ondes sismiques d'une poignée de séismes, les plus intenses observés sur deux années, les scientifiques ont pu affiner nos connaissances sur la structure interne de Mars. La croûte de la planète a une épaisseur qui est comprise entre 20 ou 39 kilomètres immédiatement sous l'instrument SEIS (la valeur dépend de la composition précise des sous-couches qui n'est pas connue). À partir des données géologiques de surface, on peut en déduire que l'épaisseur de la croûte pour le reste de la planète est comprise entre 24 et 72 kilomètres. Le noyau métallique, sur lequel les ondes sismiques rebondissent, se situe à une profondeur de 1 560 kilomètres, ce qui implique que son rayon est de 1 830 kilomètres (avec une incertitude de 40 kilomètres). Cette valeur le situe à la limite supérieure des prévisions. La masse de la planète étant déjà connue, la densité de ce noyau de grande taille est relativement faible (5,7 à 6,3), ce qui implique qu'il doit comprendre, outre du fer et du nickel, une quantité notable d'éléments légers comme le soufre. Une autre conséquence importante est la minceur de la couche située entre le noyau et la croûte (le manteau). Ce dernier est sans doute une simple couche de roches sans stratification contrairement à la Terre. La pression trop faible n'a en effet pas permis à la bridgmanite de se former. Ce minéral dans le cas de la Terre contribue à ralentir la convection et donc la vitesse de déperdition de la chaleur interne. Mars a dû donc connaître un refroidissement rapide[82].
Les enregistrements sismiques ont permis de distinguer trois couches dans le sous-sol : le duricrust, une couche indurée de quelques centimètres ; le régolithe, une strate superficielle formée de matériaux concassés par les impacts pendant des milliards d’années ; une couche altérée d'une dizaine de kilomètres d'épaisseur. Au-dessous se trouve une croûte profonde consolidée, où la diffusion et l'atténuation des ondes sont semblables à celles des massifs cristallins terrestres[76],[77].
Météorologie
[modifier | modifier le code]Les capteurs météorologiques mesurent presque continûment la vitesse et la direction des vents, ainsi que la pression atmosphérique. Ils ont détecté des centaines de turbulences, dont certaines sont à l'origine de tourbillons de poussière (dust devils)[73] ;
Magnétisme
[modifier | modifier le code]Le magnétomètre a détecté un champ magnétique dix fois supérieur à ce qui était prévu sur la base des données satellitaires et des valeurs moyennes calculées sur quelques centaines de kilomètres (les mesures d'InSight concernent une zone beaucoup plus locale). Les roches voisines du lieu d’atterrissage étant trop jeunes pour avoir été aimantées par l'ancien champ global de Mars, le champ mesuré doit provenir de roches plus profondes. InSight a également détecté des impulsions magnétiques en milieu de nuit, dont l'origine est encore inconnue[74] ;
Caractéristiques techniques de la sonde spatiale
[modifier | modifier le code]InSight reprend l'architecture de la sonde spatiale Phoenix qui s'était posée sur la planète Mars en . Ce choix a permis de limiter les coûts et apporte dans une certaine mesure une garantie de bon fonctionnement. La sonde spatiale est fabriquée par le même constructeur Lockheed Martin Space Systems, dans son établissement de Denver au Colorado. La sonde spatiale utilise une avionique reflétant l'état de l'art et développée pour les sondes Mars Reconnaissance Orbiter et GRAIL[20].
La sonde spatiale a une masse au lancement de 694 kg. Dans la configuration adoptée durant son transit vers Mars, la sonde spatiale a une hauteur de 1,76 mètre, un diamètre de 2,64 mètres (au niveau de son bouclier thermique), tandis que les deux panneaux solaires, déployés après le lancement, portent son envergure à 3,40 mètres. La sonde spatiale comprend trois sous-ensembles[20] :
- l'étage de croisière (79 kg), qui prend en charge le transit entre la Terre et Mars (1 dans le schéma 2) ;
- le bouclier thermique, d'une masse de (189 kg), qui protège l'atterrisseur durant la descente vers le sol de Mars et qui comprend un parachute (2 et 6 dans le schéma 2) ;
- l'atterrisseur (358 kg), qui est le seul élément qui se pose sur Mars et qui emporte les différents instruments scientifiques. Il emporte 55 kg d'ergols, utilisés durant le transit vers Mars et pendant la phase de descente vers le sol martien (3, 4 et 5 dans le schéma 2).

Étage de croisière
[modifier | modifier le code]
L'étage de croisière prend en charge le transit entre la Terre et Mars. Il fournit l'énergie nécessaire aux systèmes de vol (ordinateur de bord, moteurs pour les changements de trajectoire etc.) pendant toute la durée de cette phase. Le cœur de l'étage de croisière est un cylindre court, de 95 centimètres de diamètre, sur lequel sont fixés de part et d'autre deux panneaux solaires. Ceux-ci portent l'envergure de l'étage de croisière à 3,4 mètres. D'une superficie de 3,2 m2, ils fournissent une puissance de 957 watts au voisinage de la Terre et de 477 watts à proximité de Mars. L'équipement installé comprend des antennes faible et moyen gain, un émetteur radio en bande X, deux capteurs solaires et deux viseurs d'étoiles. Le fonctionnement de l'étage de croisière repose en partie sur des équipements installés dans le bouclier thermique. Ainsi, pour corriger sa trajectoire ou modifier son orientation dans l'espace, l'étage de croisière utilise 8 petits moteurs-fusées, regroupés par deux (un moteur d'une poussée de quatre newtons pour le contrôle d'attitude et un moteur de (?) newtons pour les corrections de trajectoire), dont la tuyère émerge du bouclier thermique arrière par quatre orifices. De même, durant le transit, c'est l'ordinateur embarqué de l'atterrisseur qui pilote les opérations. L'étage de croisière est largué peu avant le début de l'entrée dans l'atmosphère martienne[40],[83].
Bouclier thermique
[modifier | modifier le code]
Le bouclier thermique assure la protection thermique de l'atterrisseur durant la rentrée atmosphérique, lorsque l'étage pénètre à grande vitesse (environ 6 kilomètres par seconde) dans les couches plus épaisses de l'atmosphère martienne et que la température de la face avant atteint environ 1 500 °C. Le bouclier thermique est composé de deux éléments, tous deux de forme conique et d'un diamètre de 2,64 mètres : le bouclier avant, plus aplati, est haut d'environ 60 centimètres, tandis que le bouclier arrière fait environ 1 mètre de haut. Cette coque, qui enveloppe l'atterrisseur, le protège de la chaleur grâce à un revêtement de type SLA-561, qui recouvre sa surface en couches plus épaisses sur le bouclier avant, plus exposé. Il inclut les parachutes destinés à réduire la vitesse de descente une fois le bouclier thermique largué[40]. Le SLA-561 est un matériau ablatif mis au point dans les années 1970 pour les sondes spatiales du programme Viking et utilisé sur les véhicules spatiaux soumis durant une rentrée atmosphérique à des flux thermiques modérés. Il est constitué d'une structure en nid d'abeilles en fibres de verre remplie principalement avec des granulés de liège. Ce dernier est caractérisé par son pouvoir isolant dû à sa structure constituée de petites cellules remplies d'air aux parois non conductrices[84],[85].
Atterrisseur
[modifier | modifier le code]L'atterrisseur emporte la charge utile de la sonde spatiale et c'est le seul élément de la sonde spatiale à se poser sur le sol. Il se présente sous la forme d'une plateforme de 1,5 mètre de diamètre, posée sur trois pieds comportant un système d’absorption de choc. Sa masse est de 360 kg, dont 50 kg pour les instruments scientifiques, sans compter les 67 kg d'ergols. Sa hauteur, entre la base de ses pieds et le plateau supérieur, est comprise entre 83 et 108 centimètres, en fonction du degré d'écrasement des jambes résultant de l'impact de l'atterrissage. Son envergure, une fois les panneaux solaires déployés, est de six mètres. Les deux panneaux solaires, en forme de décagones réguliers, fournissent entre 600 et 700 watts[h] lorsque la luminosité est bonne et au minimum 200 à 300 watts un jour chargé de poussière, alors que les panneaux sont eux-mêmes recouverts de poussière. Ils alimentent deux batteries lithium-ion, d'une capacité unitaire de 25 ampères-heures[40].

Les équipements installés sur le plateau supérieur comprennent une antenne hélicoïdale UHF, pour transmettre des données aux orbiteurs martiens, qui les relaient vers la Terre, deux antennes moyen gain en bande X pour communiquer directement avec la Terre. Un bras préhensile est également fixé sur le plateau : il est chargé d'installer sur le sol le sismomètre, sa protection thermique et l'instrument de mesure des flux thermiques, fixés sur le plateau jusqu'à l'arrivée sur Mars. Sur le plateau supérieur se trouvent également des capteurs faisant partie de la suite APSS (Auxiliary Payload Sensor Subsystem), mesurant le champ magnétique local, la température, la pression ainsi que la vitesse et la direction du vent. On trouve également deux puces électroniques contenant les noms de 2,4 millions de personnes, recueillies sur internet dans le cadre d'une campagne intitulée envoyez votre nom sur Mars[40],[86].
L'avionique est enfermée dans une enceinte isolée thermiquement, située sous le plateau. Elle comprend notamment l'ordinateur embarqué, qui contrôle les opérations durant l'ensemble de la mission, du transit vers Mars jusqu'à l'achèvement de la mission. Cet équipement, qui est présent en deux exemplaires pour assurer une redondance, repose sur un microprocesseur RAD 750 version radiodurcie du PowerPC 750, cadencée à 115,5 mégahertz. Les données scientifiques sont stockées dans une mémoire de masse de type mémoire flash, d'une capacité de 64 gigaoctets. Les programmes sont écrits en C et C++, ils tournent sous un système d'exploitation VxWorks[40].
-
 Schéma 3 : Configuration de la sonde spatiale durant le transit vers Mars : 1 : Panneaux solaires fixes (×2), 2 : Viseur d'étoiles (×2), 3 : Propulseurs (×4), 4 : Antenne moyen gain MGA, 5 : Bouclier thermique encapsulant l'atterrisseur, 6 : capteur solaire (×2), 7 : Étage de croisière, 8 : Antenne faible gain LGA (×2).
Schéma 3 : Configuration de la sonde spatiale durant le transit vers Mars : 1 : Panneaux solaires fixes (×2), 2 : Viseur d'étoiles (×2), 3 : Propulseurs (×4), 4 : Antenne moyen gain MGA, 5 : Bouclier thermique encapsulant l'atterrisseur, 6 : capteur solaire (×2), 7 : Étage de croisière, 8 : Antenne faible gain LGA (×2). -
 Schéma 4 : Atterrisseur au sol avec les instruments déployés : A : Sismomètre WTS/SEIS, B : Capteur de flux de chaleur HP3, C : Bras déploiement instrument IDA, 1 : Capteurs de température et de vent TWINS, 2 : Radiomètre, 3 : Capteur de pression, 4 : Antennes à faible gain LGA, 5 : Capteur du magnétomètre fluxgate IFG, 6 : Caméra utilisée pour le déploiement IDC, 7 : Caméra de contexte ICC.
Schéma 4 : Atterrisseur au sol avec les instruments déployés : A : Sismomètre WTS/SEIS, B : Capteur de flux de chaleur HP3, C : Bras déploiement instrument IDA, 1 : Capteurs de température et de vent TWINS, 2 : Radiomètre, 3 : Capteur de pression, 4 : Antennes à faible gain LGA, 5 : Capteur du magnétomètre fluxgate IFG, 6 : Caméra utilisée pour le déploiement IDC, 7 : Caméra de contexte ICC.


Les instruments scientifiques
[modifier | modifier le code]La charge utile d'InSight a une masse totale de 50 kilogrammes. Les deux instruments scientifiques contribuant aux principaux objectifs de la mission et qui seront déposés sur le sol de Mars à l'aide d'un bras télécommandé, sont : le sismomètre SEIS et le capteur de flux de chaleur HP3. Cette charge utile est complétée par une station météorologique et un magnétomètre, contribuant à affiner les mesures effectuées par les deux instruments principaux.
Sismomètre SEIS
[modifier | modifier le code]
Le Seismic Experiment for Interior Structure (SEIS, expérience sismique pour la structure intérieure) est un sismomètre à trois axes, N-S, E-O et vertical, qui prendra des mesures précises des séismes et autres activités internes sur Mars, afin de mieux comprendre l'histoire de la planète et la conformation de sa structure. L'instrument, qui a une masse totale de 29,5 kg, est composé des capteurs sismiques, associés à des capteurs de température, un boîtier électronique pour l'acquisition des données, un système de déploiement et un logiciel chargé de faire fonctionner l'ensemble.
Capteurs très large bande
[modifier | modifier le code]Le cœur de l'instrument est constitué par des capteurs très large bande VBB (Very Broad Band), capables de percevoir des ondes sismiques dont la fréquence est comprise entre 0,001 et 10 hertz (3 dans le schéma 5). Ce sont trois pendules d'une très grande sensibilité, chacun destiné à la mesure des mouvements du sol dans un des trois axes. Le pendule est constitué par une masselotte de 120 grammes reliée par un ressort à un pivot (52 × 1,8 cm) comprenant une partie fixe et une partie mobile. Le rôle du pivot est de fournir une articulation complètement libre, sans frottement. Les deux parties du pivot sont reliées entre elles par 20 petites lamelles flexibles, réalisées en cuivre et en béryllium, d'une épaisseur de 20 micromètres. Le mouvement du sol est transmis à la masselotte puis au le ressort et à la partie mobile du pivot, dont le débattement maximum, limité par des butées, est de 50 micromètres. Le ressort joue un rôle central dans la fonction du pendule. Il ramène celui-ci à sa position de départ après chaque vibration. Il est réalisé dans un matériau très spécifique (Thermelast), qui présente la particularité de conserver de manière quasi inchangée ses dimensions en cas de variation de la température. Par contre, celle-ci induit une modification de son magnétisme qui, s'il a peu d'influence sur Mars — pratiquement dépourvue de champ magnétique — nécessite toutefois l'emport d'un magnétomètre par la sonde spatiale pour corriger les mesures. À l'autre extrémité du ressort, la masselotte se déplace entre deux parties fixes. Le débattement de la masselotte est très limité : en théorie 150 micromètres, mais la flexibilité du pivot n'autorise que 50 micromètres. La distance entre la masselotte et la partie fixe qui l'encadre est mesurée à l'aide d'un capteur baptisé DCS (Differential Capacity Sensor). Celui-ci est constitué d'électrodes qui enregistrent les variations de capacité électrique entre les deux parties. Ces capteurs peuvent enregistrer des déplacements de l'ordre de 50 picomètres (soit un dixième du rayon de l'atome d'hydrogène). Les informations fournies par le DCS sont transmises à un mécanisme de contre-réaction, constitué de bobines dans lesquelles circule un courant proportionnel au déplacement mesuré. Ces bobines génèrent un champ magnétique, qui va créer une force de rappel qui neutralise le déplacement de la masselotte. Ce sont les courants générés par ce dernier dispositif qui est exploité pour mesurer les mouvements sismiques. Plusieurs dispositifs sont utilisés pour régler de manière fine le pendule. La partie mobile du pivot est centrée grâce à un dispositif électromécanique afin de tenir compte de la force de gravité sur le site d'atterrissage (sur Mars elle est en moyenne de 3,71 m/s2, mais elle n'est pas complètement uniforme). Des capteurs thermiques mesurent les variations de température. Un mécanisme, baptisé TDCM (dispositif de contrôle thermique), reposant sur des métaux ayant des coefficients de dilatation différents, compense les changements de température qui, malgré les multiples barrières thermiques isolant les pendules de l'extérieur, pourront faire varier la température interne de 10 °C[87].
- Schéma de l'instrument SEIS
-
 Schéma 5 : sismomètre SEIS : 1 et 7 : Bouclier éolien et thermique - 2 : Points d'accrochage - 3 : Capteurs large bande - 4 : Sphère étanche et sous vide - 5 : Pieds réglables (x3) - 6 : Capteurs courte période (x3).
Schéma 5 : sismomètre SEIS : 1 et 7 : Bouclier éolien et thermique - 2 : Points d'accrochage - 3 : Capteurs large bande - 4 : Sphère étanche et sous vide - 5 : Pieds réglables (x3) - 6 : Capteurs courte période (x3). -
 Schéma 6 : Coupe du sismomètre SEIS.
Schéma 6 : Coupe du sismomètre SEIS.

.jpg)
Enceinte sous vide
[modifier | modifier le code]Les capteurs très large bande sont enfermés dans une enceinte sphérique, de la taille approximative d'un melon, réalisée en titane (4 dans le schéma 5). Un vide très poussé est maintenu dans la sphère. Cette sphère remplit plusieurs objectifs. À la surface de Mars, la température connaît de grandes amplitudes, les différences de température quotidiennes pouvant atteindre 70 °C. Or, la présence de gaz génère des ponts thermiques entre l'extérieur et les capteurs, qui accroissent le bruit et affectent la précision des mesures. D'autre part, l'impact des molécules de gaz sur le pendule servant de capteur affecte également son mouvement. Enfin, en faisant le vide, on écarte les poussières qui pourraient affecter les parties mobiles. À l'atterrissage sur Mars, la pression à l'intérieur de la sphère est de 0,01 millibar et ne devrait pas excéder 0,1 millibar à la fin de la mission primaire, au bout de 2 ans[88],[15].
Capteurs courte période
[modifier | modifier le code]SEIS comprend également trois capteurs sismiques de courte période (6 dans le schéma 5) SP (Short Period) fixés sur la paroi extérieure de la sphère. Ceux-ci sont optimisés pour mesurer les ondes sismiques dont la fréquence est supérieure à 1 hertz. Leur bande passante, comprise entre 0,1 et 40 Hz, recouvre en partie celle des capteurs à large bande et permet d'assurer une redondance partielle en cas de défaillance de ceux-ci. Moins sensibles que les capteurs large bande, ils sont placés à l'extérieur de la sphère, sous vide. Ce sont des capteurs beaucoup plus compacts (taille proche de celle d'une pièce d'un euro) et la masselotte, dont les déplacements sont mesurés à l'aide d'électrodes, a une masse d'un gramme. Ils sont usinés dans une galette de silicium, par gravure ionique. Ils sont associés à des capteurs de température, utilisés pour corriger les mesures effectuées[89].
Berceau réglable et enveloppe thermique
[modifier | modifier le code]
_and_domed_Wind_and_Thermal_Shield_(covering_SEIS)_in_preparation_for_thermal_vacuum_testing_Image-35-full.jpg)
Pour pouvoir être utilisé, l'instrument SEIS doit être posé sur le sol. Le terrain sur Mars ne peut être aplani, or l'instrument SEIS, pour fonctionner de manière optimale, doit être posé sur la surface la plus plate possible et la plus proche de l'horizontale. Pour remplir cet objectif, la sphère est posée sur un berceau comportant trois pieds (5 dans le schéma 5) dont la hauteur peut être modifiée à l'aide de moteurs électriques. Le débattement maximal de 6 centimètres permet de compenser un dénivelé de 15° avec une précision de 0,1°. Les irrégularités locales (caillou, creux), si elles ne sont pas détectées avant la dépose de l'instrument sur la surface, seront traitées en modifiant la position de l'instrument, à l'aide du bras télécommandé[90]. L'ensemble formé par la sphère et le berceau est enfermé dans une structure hexagonale, baptisée RWEB (Remote Warm Enclosure Box). qui forme une barrière thermique par rapport à l'extérieur. Celle-ci comporte deux couches d'isolant de type mylar, séparées par un espace de moins de deux centimètres, dans lequel on laisse s'insinuer volontairement le dioxyde de carbone, qui est le constituant principal de l'atmosphère de la planète. Celui-ci, qui a tendance à stagner dans les espaces confinés, contribue à renforcer l'isolation thermique. Au sommet de l'enveloppe thermique émerge une tige terminée par une petite sphère (2 dans le schéma 5), qui permet au bras télécommandé d'InSight de déplacer l'instrument. Un cadran solaire temporaire, dessiné autour de cette poignée, permet de déterminer avec précision l'angle du sismomètre par rapport au Nord avant que l'instrument ne soit placé sous la coiffe de protection décrite ci-dessous[91]. L'ensemble de l'instrument pèse environ 3 kg et consomme environ 1 watt[92].
La cloche éolienne et thermique WTS
[modifier | modifier le code]Sur Terre, les sismomètres sont placés dans des sites très calmes, loin des perturbations atmosphériques et caractérisés par des variations thermiques faibles, tels que des caves ou des puits de mine. Pour approcher ces conditions sur Mars, il n'est pas possible d'enterrer l'instrument. Le JPL a conçu une cloche (1 et 7 dans le schéma 5), dont le rôle est de bloquer le vent et la poussière et d'atténuer et filtrer les changements de température. Cette cloche est composée d'une partie supérieure, de forme hémisphérique et réalisée en nid d'abeilles d'aluminium, posée sur trois pieds et d'une jupe extensible, qui permet d'englober l'instrument, en épousant les irrégularités du terrain. Cette jupe est réalisée en cotte de mailles métallique, qui allie la souplesse et la masse nécessaires pour remplir son office. La cloche a un diamètre de 69 centimètres et une hauteur de 35 centimètres. Sa masse de 12 kilogrammes devrait lui permettre de résister à la poussée de vents de 60 à 100 mètres par seconde (jusqu'à 360 km/h)[93].
Électronique
[modifier | modifier le code]Hormis l'électronique chargée d'amplifier les signaux, l'électronique permettant à l'instrument de fonctionner se trouve pratiquement dans sa totalité dans un boîtier (l'eBOX) installé avec l'avionique sous le pont principal de la sonde spatiale. L'électronique permet à l'instrument de fonctionner en continu de manière autonome, même lorsque l'atterrisseur est en sommeil. Le boîtier contient neuf cartes, dont deux destinées respectivement à l'alimentation électrique et à la gestion et au contrôle des données, trois destinées à la gestion des capteurs VLB. Une carte gère les capteurs courte période et une autre le système de mise à niveau du sismomètre[94].
Les contributeurs
[modifier | modifier le code]L'instrument SEIS est réalisé sous maîtrise d’œuvre du CNES (conception, intégration, tests), avec la participation de l'Institut de physique du globe de Paris (IPGP), de la SODERN, fabricant des capteurs très large bande, l'École polytechnique fédérale de Zurich (ETH), qui fournit l'électronique, l'Institut Max-Planck de recherche sur le Système solaire (MPS) qui fournit le système de nivelage, l'Imperial College London, qui fournit les capteurs courte période, l'Institut supérieur de l'aéronautique et de l'espace (ISAE) et le Jet Propulsion Laboratory (cloche et sphère). Une version préliminaire de SEIS avait été embarquée sur la sonde spatiale soviétique Mars 96, détruite au cours de son lancement, puis a été successivement proposé sur plusieurs projets de mission qui n'ont pas abouti : NetLander, ExoMars (dans l'ensemble instrumental Humboldt), International Lunar Network, SELENE-2[95].
Capteur de flux de chaleur HP3
[modifier | modifier le code]

L'instrument Heat Flow and Physical Properties Package (HP3, ensemble instrumental flux de chaleur et propriétés physiques), fourni par l'agence spatiale allemande (DLR), est un capteur de flux de chaleur, qui s'enfoncera jusqu'à une profondeur de cinq mètres dans le sous-sol martien, plus profondément que tous les instruments utilisés jusque-là sur Mars : pelles, foreuses et sondes. C'est la première fois qu'un instrument de ce type est utilisé sur le sol d'une planète autre que la Terre. HP3 doit mesurer la quantité de chaleur dégagée depuis le noyau de Mars et fournir ainsi des indices sur l'histoire thermique de la planète[96].
La profondeur visée a été choisie pour que les mesures ne soient pas perturbées par les variations quotidiennes et saisonnières de la température de la surface. Cette profondeur est suffisante car, contrairement à la Terre, il n'y a pas de nappes d'eau souterraines pouvant perturber la circulation de la chaleur interne. L'instrument comprend un équipement de forage, constitué par un tube de 2,7 cm de diamètre et de 40 centimètres de long à l'intérieur duquel se trouve un bloc de tungstène mobile. Celui-ci est fixé entre deux ressorts. Pour enfoncer le tube, un dispositif animé par un moteur électrique relève le bloc en compressant le ressort supérieur, puis le laisse retomber. Ce mouvement est répété toutes les 3,6 secondes afin d'enfoncer progressivement le tube. Il doit permettre d'atteindre la profondeur voulue en moins de 30 jours, après 5 000 à 20 000 frappes (en fonction de la nature du sol)[97].
Le tube entraîne un câble jouant plusieurs rôles et relié à un support fixe posé en surface. Ce dernier est lui-même relié à l'atterrisseur par un second câblage. Le support contient un magasin d'où émerge le câble, au fur et à mesure de la descente du tube foreur. Ce câble transporte l'énergie électrique nécessaire au fonctionnement du système de forage, ainsi que les données recueillies par les capteurs du tube. Il comporte également 14 capteurs de température, espacés régulièrement (ceux situés sur la portion proche du tube sont les plus rapprochés : 23 centimètres). Ces capteurs permettent de mesurer le gradient thermique sous la surface, une fois que le tube foreur a atteint la profondeur désirée[97].
Radio science
[modifier | modifier le code]La mission comprend une expérience de radio-science, baptisée Rotation and Interior Structure Experiment (RISE, expérience rotation et structure intérieure). Le système de télécommunications d'InSight sera mis à contribution pour identifier les oscillations de l'axe de rotation de Mars, en mesurant l'effet Doppler induit sur les transmissions radio. Ces variations touchant l'axe de rotation sont liées à l'absence d'homogénéité à l'intérieur de la planète. Leurs mesures doivent permettre de mieux comprendre la structure interne de Mars[98].
Station météorologique APSS
[modifier | modifier le code]InSight embarque la suite d'instruments APSS (Auxiliary Payload Sensor Suite), qui doit fournir le contexte environnemental permettant l'interprétation des données du sismomètre. Cette suite comprend un magnétomètre fluxgate et la mini-station météorologique TWINS (Temperature and Winds for InSight) fournie par le Centro de Astrobiología espagnol. Les capteurs de cette station comprennent un baromètre, un anémomètre et un thermomètre. Le magnétomètre est fourni par l'UCLA et mesure le champ magnétique avec une précision de 0,1 nT. Le baromètre est capable de détecter des fluctuations de six millipascals. Tous les instruments sont installés sur la sonde spatiale par le Jet Propulsion Laboratory[99].
Système de déploiement IDS et les caméras IDC/ICC
[modifier | modifier le code]InSight doit déployer ses instruments, une fois arrivé au sol. Ceci est effectué par l'IDS (Instrument Deployment System), qui comprend un bras articulé, assisté de deux caméras dont les caractéristiques ne diffèrent que par l'optique utilisée. Le bras, qui est fixé sur le plateau supérieur, est long de 1,8 mètre et comprend trois articulations (épaule, coude, poignet) actionnées par quatre moteurs. Au bout du bras se trouve un grappin formé de 5 "doigts" qui est utilisé pour attraper les trois éléments qui seront déposés sur le sol de Mars[100]. La caméra IDC (Instrument Deployment Camera), semblable aux NavCam des rovers MER, est montée sur le bras. Son rôle est de prendre des images en couleur immédiatement après l'atterrissage des instruments installés sur la plateforme de l'atterrisseur et de fournir une vue stéréoscopique de la portion de sol où le sismomètre et le capteur de flux de chaleur seront installés. Elle est ensuite utilisée pour aider les ingénieurs et les scientifiques à déployer les instruments au sol avec le bras. Ayant un champ de vue de 45 degrés et une profondeur de champ allant de 50 centimètres à l'infini, la caméra permet également d'obtenir des vues panoramiques de l'environnement immédiat du site d'atterrissage. Le temps d'exposition peut être réglé entre 0 et 406 secondes par pas de 6,2 millisecondes. Une deuxième caméra ICC (Instrument Context Camera), analogue aux Hazcam des MER et dotée d'un objectif fisheye de 120 degrés, est montée sous le bord du plateau supérieur de la sonde spatiale et fournit une vue complémentaire sur la zone de déploiement de l'instrument. Les deux caméras utilisent un détecteur CCD de 1 025 × 1 024 pixels. Toutes deux sont des pièces de rechange de la sonde spatiale Mars Science Laboratory[101],[98].
Galerie
[modifier | modifier le code]-

-
 Sur cette photo du plateau supérieur de l'atterrisseur sont visibles les drapeaux des pays et sigles des agences spatiales contributeurs de la mission, les mires (ronds colorés) utilisées pour étalonner les couleurs de la caméra, le rétroréflecteur LaRRI en coins de cube (en bas à gauche) et à droite de ce dernier, une des deux puces contenant les noms des participants à la campagne « envoyez votre nom sur Mars ».
Sur cette photo du plateau supérieur de l'atterrisseur sont visibles les drapeaux des pays et sigles des agences spatiales contributeurs de la mission, les mires (ronds colorés) utilisées pour étalonner les couleurs de la caméra, le rétroréflecteur LaRRI en coins de cube (en bas à gauche) et à droite de ce dernier, une des deux puces contenant les noms des participants à la campagne « envoyez votre nom sur Mars ». -
 La salle de contrôle en liesse au moment de l'atterrissage.
La salle de contrôle en liesse au moment de l'atterrissage. -
 Cette image panchromatique montre le site d'atterrissage d'InSight sur Mars. Elle a été prise par l'instrument CaSSIS (Colour and Stereo Surface Imaging System) du satellite ExoMars Trace Gas Orbiter, issu de la collaboration entre l'Agence spatiale européenne et Roscosmos, le . L'image montre une surface de plus ou moins 2,25 km x 2,25 km dans la zone Elysium Planitia.
Cette image panchromatique montre le site d'atterrissage d'InSight sur Mars. Elle a été prise par l'instrument CaSSIS (Colour and Stereo Surface Imaging System) du satellite ExoMars Trace Gas Orbiter, issu de la collaboration entre l'Agence spatiale européenne et Roscosmos, le . L'image montre une surface de plus ou moins 2,25 km x 2,25 km dans la zone Elysium Planitia.
.jpg)



Notes et références
[modifier | modifier le code]Notes
[modifier | modifier le code]- ↑ En l'absence de tectonique des plaques et d'activité volcanique, comme c'est le cas pour Mars ou la Lune, ces mouvements sont provoqués principalement par la contraction de la planète liée au refroidissement de son noyau et de manière secondaire aux impacts de météorites, plus fréquents que sur Terre en raison de l'atmosphère fine (1 % de celle de la Terre).
- ↑ Cette version ne comporte aucun propulseur d'appoint alors que la version la plus puissante en comporte cinq et permet de placer 20 tonnes en orbite basse contre 12 tonnes.
- ↑ Plusieurs missions ont emporté un microphone sur Mars, mais celui-ci n'a jamais pu être utilisé : Mars Polar Lander s'est écrasé durant sa descente sur le sol martien, la mission NetLander, qui devait emporter un microphone, a été annulée, le microphone embarqué à bord de l'atterrisseur Phoenix n'a jamais été activé par crainte d'une panne électrique. La prochaine mission à emporter un microphone est le rover Mars 2020 : celui-ci enregistrera notamment l'atterrissage sur Mars et les sons produits par le laser de l'instrument ChemCam.
- ↑ L'atmosphère de Mars étant très ténue, il faudrait que le vent souffle à plus de 100 km/h pour qu'il puisse être entendu. Par contre les infrasons enregistrés par le capteur de pression sont transportés de manière identique sur Mars et sur Terre.
- ↑ La profondeur à laquelle se situe le socle rocheux est déduite de l'observation des cratères voisins sur les photos prises par l'orbiteur. Les éjectas associés à ces cratères ne comprennent des blocs rocheux que lorsque le diamètre de ceux-ci dépassent 100 mètres diamètre. Or les études effectuées sur les cratères martiens ont démontré que l'impact à l'origine de leur formation excavait la surface jusqu'à une profondeur d'environ un dixième de leur diamètre.
- ↑ Le fonctionnement des moteurs actionnant le bras nécessite que la température soit au minimum de −50 °C mais par ailleurs au-delà de −35 °C le bras qui doit supporter à son extension maximum la charge relativement élevée du sismomètre pourrait fléchir légèrement
- ↑ Cinq dans Nature Geoscience[72],[73],[74],[75],[76], un dans Nature Communications[77].
- ↑ Sur une orbite terrestre plus proche du Soleil ils fourniraient 1 800 watts.
Références
[modifier | modifier le code]- (en) W.B. Banerdt et C.T. Russell, « Editorial on: Topical Collection on InSight Mission to Mars », Springer, .
- ↑ P. Labrot, « Viking fut la première (et la seule) mission à déposer un sismomètre sur Mars », sur seis-insight.eu, Institut de physique du globe de Paris, (consulté le ).
- ↑ Robotic exploration of the solar system - Part 4 : the Modern Era 2004-2013, p. 333.
- ↑ (en) « NASA Selects Investigations For Future Key Planetary Mission », NASA (consulté le ).
- ↑ (en) Kate Taylor, « NASA picks project shortlist for next Discovery mission », sur TG Daily, (consulté le ).
- ↑ (en) « New NASA Mission to Take First Look Deep Inside Mars », NASA, .
- ↑ JPL changes name of Mars mission proposal, Glendale NewsPress.
- ↑ (en) NASA, « NASA Awards Launch Services Contract for InSight Mission », .
- ↑ CNES, « Le CNES et la NASA iront ensemble sur Mars - Le sismomètre SEIS au cœur de la mission InSight », .
- ↑ Stefan Barensky, « InSight : une coopération comme on n’en verra plus », sur Aerospatium, .
- ↑ CNES, « Feu vert pour InSight, le prochain atterrisseur martien de la NASA ! », .
- ↑ (en) « Construction to Begin on 2016 NASA Mars Lander », NASA/Jet Propulsion Laboratory, .
- ↑ (en) « Next NASA Mission to Mars Reaches Development Milestone », NASA/Jet Propulsion Laboratory, .
- ↑ (en) « NASA Begins Testing Mars Lander for Next Mission to Red Planet », NASA/Jet Propulsion Laboratory, .
- (en) Philippe Lognonné, « From Moon seismology to Mars with the SEIS Instrument on the NASA InSight mission », sur European Geosciences Union, Université Paris Diderot, , p. 26.
- ↑ (en) Casey Dreier, « NASA's Next Mars Mission Delayed for Two Years - One of its main scientific instruments could not maintain a vacuum », The Planetary Society, .
- ↑ (en) Emily Lakdawalla, « InSight has a new launch date: May 5, 2018 », The Planetary Society, .
- ↑ (en) « NASA Targets May 2018 Launch of Mars InSight Mission », Jet Propulsion Laboratory, .
- ↑ (en) Government Accountability Office, Report to Congressional Committees : NASA Assessments of Major Projects, GAO, , 127 p. (lire en ligne [PDF]), p. 57-58.
- (en) « Facts / Spacecraft », sur JPL InSight Press kit, NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « InSight: Science objectives », NASA/Jet Propulsion Laboratory (consulté le ).
- ↑ (en) Matt Golombek Bruce Banerdt (JPL), « InSight Project Status and Landing Site Selection », , p. 4.
- ↑ Planned Products of the Mars Structure Service for the InSight Mission to Mars, p. 5-6.
- ↑ (en) Raphael F. Garcia, Ingrid J. Daubar, Éric Beucler et Liliya V. Posiolova, « Newly formed craters on Mars located using seismic and acoustic wave data from InSight », Nature Geoscience, vol. 15, no 10, , p. 774–780 (ISSN 1752-0908, DOI 10.1038/s41561-022-01014-0).
- ↑ (en) mars.nasa.gov, « NASA's InSight Lander Detects Stunning Meteoroid Impact on Mars », sur NASA Mars Exploration (consulté le ).
- ↑ (en) « Largest recent impact craters on Mars: Orbital imaging and surface seismic co-investigation », Science, .
- ↑ (en) « Surface waves and crustal structure on Mars », Science, .
- ↑ (en) Matt Golombek Bruce Banerdt (JPL), « InSight Project Status and Landing Site Selection » [PDF], , p. 12.
- ↑ (en) Matt Golombek et Bruce Banerdt (JPL), « InSight Project Status and Landing Site Selection » [PDF], , p. 13-26.
- ↑ (en) « Single Site on Mars Advanced for 2016 NASA Lander », sur Jet Propulsion Laboratory, .
- ↑ (en) « Mission/ Landing Site », sur JPL InSight Press kit, NASA/Jet Propulsion Laboratory (consulté le ).
- ↑ (en) « JPL Science: People - Bruce Banerdt », Website, NASA's Jet Propulsion Laboratory.
- ↑ (en) « JPL Sciences: People - Sue Smrekar », Website, NASA's Jet Propulsion Laboratory (consulté le ).
- ↑ « Site SEIS du CNES », CNES (consulté le ).
- ↑ (en) « JPL Science and Technology: Sami Asmar » [archive du ], NASA's Jet Propulsion Laboratory.
- ↑ (en) « INSIGHT NASA Fact sheet » [PDF], NASA's Jet Propulsion Laboratory (consulté le ).
- ↑ (en) « InSight : mission overview », NASA/JPL (consulté le ).
- ↑ (en) William Graham, « Atlas V launches first West Coast interplanetary mission with InSight spacecraft to Mars », nasaspaceflight.com, .
- ↑ Dossier de presse de lancement, p. 23.
- (en) « Mission / Spacecraft », sur JPL InSight Press kit, NASA/Jet Propulsion Laboratory (consulté le ).
- Dossier de presse d'atterrissage, p. 18-23.
- ↑ Dossier de presse d'atterrissage, p. 23.
- ↑ (en) « MarCO (Mars Cube One) — Mission Overview », NASA/JPL (consulté le ).
- ↑ (en) « MarCO: First Interplanetary CubeSat Mission », NASA/JPL (consulté le ).
- ↑ (en) « Mars New Home 'a Large Sandbox' », NASA/JPL, .
- ↑ (en) « NASA's Mars InSight Flexes Its Arm », sur Site officiel InSight, NASA/JPL, .
- ↑ (en) « NASA InSight Lander 'Hears' Martian Winds », sur Site officiel InSight, NASA/JPL,
- ↑ (es) Daniel Marin, « El sonido de los vientos de marcianos de Elysium Planitia (más o menos) », sur Blog Eureka, .
- ↑ Dossier de presse de lancement, p. 28-29.
- ↑ (en) Emily Lakdawalla, « InSight update, sols 1-24: Operations begin, first instrument deployed », The Planetary Society,
- ↑ (en) « NASA's InSight Places First Instrument on Mars », sur Site officiel InSight, NASA/JPL,
- ↑ (en) « InSight : mission overview », NASA/JPL (consulté le ).
- ↑ (en) Matt Golombek & Bruce Banerdt (JPL), « InSight Project Status and Landing Site Selection » [PDF], , p. 4.
- ↑ (en) « More Testing for Mars InSight's 'Mole' », sur NASA InSight, NASA, .
- ↑ (en) « InSight's Team Tries New Strategy to Help the 'Mole' », sur NASA InSight, NASA, .
- ↑ (en) « Common Questions about InSight's 'Mole' », sur NASA InSight, NASA, .
- ↑ (en) Tilman Spohn, « The InSight mission logbook : 27 août 2019 », sur DLR, DLR, .
- ↑ (en) « InSight's 'Mole' Team Peers into the Pit », sur NASA InSight, NASA, .
- ↑ (en) « NASA InSight's ‘Mole' Ends Its Journey on Mars », sur NASA InSight, NASA, .
- ↑ Dossier de presse de lancement, p. 29.
- ↑ P. Labrot, « InSight détecte le premier tremblement de Mars », Institut de physique du globe de Paris,
- ↑ « Les données sismiques martiennes désormais disponibles pour tous », sur CNRS (consulté le ).
- ↑ P. Labrot, « Les symphonies telluriques, atmosphériques et métalliques de SEIS », Institut de physique du globe de Paris, .
- ↑ « La mission martienne InSight et le sismomètre français SEIS prolongés par la NASA et le CNES », sur CNRS, (consulté le ).
- ↑ Eric Bottlaender, « Entretien avec l’équipe InSight du CNES », sur Spatio-notes, .
- ↑ (en) « NASA's InSight Detects Two Sizable Quakes on Mars », NASA, .
- ↑ (en) « NASA Extends Exploration for 8 Planetary Science Missions », NASA, .
- ↑ (en) « NASA's InSight Still Hunting Marsquakes as Power Levels Diminish », NASA, .
- ↑ (en) « NASA's InSight Records Monster Quake on Mars », NASA, .
- ↑ « Exploration de Mars : la sonde InSight mise à la retraite après 4 ans à écouter les entrailles de la Planète rouge », sur France Info, (consulté le ).
- ↑ « Après quatre années d’activités, clap de fin pour la mission InSight », sur CNRS, (consulté le ).
- (en) W. Bruce Banerdt, Suzanne E. Smrekar, Don Banfield, Domenico Giardini, Matthew Golombek et al., « Initial results from the InSight mission on Mars », Nature Geoscience, vol. 13, , p. 183-189 (DOI 10.1038/s41561-020-0544-y).
- (en) Don Banfield, Aymeric Spiga, Claire Newman, François Forget, Mark Lemmon et al., « The atmosphere of Mars as observed by InSight », Nature Geoscience, vol. 13, , p. 190-198 (DOI 10.1038/s41561-020-0534-0).
- (en) Catherine L. Johnson, Anna Mittelholz, Benoit Langlais, Christopher T. Russell, Véronique Ansan et al., « Crustal and time-varying magnetic fields at the InSight landing site on Mars », Nature Geoscience, vol. 13, , p. 199-204 (DOI 10.1038/s41561-020-0537-x).
- (en) D. Giardini, P. Lognonné, W. B. Banerdt, W. T. Pike, U. Christensen et al., « The seismicity of Mars », Nature Geoscience, vol. 13, , p. 205-212 (DOI 10.1038/s41561-020-0539-8).
- (en) P. Lognonné, W. B. Banerdt, W. T. Pike, D. Giardini, U. Christensen et al., « Constraints on the shallow elastic and anelastic structure of Mars from InSight seismic data », Nature Geoscience, vol. 13, , p. 213-220 (DOI 10.1038/s41561-020-0536-y).
- (en) M. Golombek, N. H. Warner, J. A. Grant, E. Hauber, V. Ansan et al., « Geology of the InSight Landing Site on Mars », Nature Communications, vol. 11, , article no 1014 (DOI 10.1038/s41467-020-14679-1).
- ↑ « La sismologie martienne commence à dévoiler la structure de Mars », sur IPGP (consulté le ).
- ↑ « Première année de la mission martienne InSight, des résultats scientifiques surprenants », sur CNRS (consulté le ).
- ↑ (en) « NASA's InSight Finds Three Big Marsquakes, Thanks to Solar-Panel Dusting », sur NASA - Mars InSight Mission, NASA,
- ↑ Tony Greicius, « NASA’s InSight Records Monster Quake on Mars », sur NASA, (consulté le ).
- ↑ (en) Jonathan Amos, « Nasa probe determines Mars' internal structure », BBC, .
- ↑ « L'atterrisseur InSight », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ (en) Sylvia M. Johnson, « hermal Protection Materials and Systems: Past and Future », NASA, , p. 30
- ↑ (en) Steven A. Sepka et Jamshid A Samareh « Thermal Protection System Mass Estimating Relationships for Blunt - Body, Earth Entry Spacecraft » () (lire en ligne) [PDF]
—45 th AIAA Thermophysics Conference. - ↑ (en) mars.nasa.gov, « More Than 2.4 Million Names Are Going to Mars – NASA's InSight Mars Lander », NASA's InSight Mars Lander, (consulté le )
- ↑ « L'instrument SEIS - Les pendules très large bande (VBB) », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - La sphère », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - Sismomètre SP », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - Mise à niveau », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - Le bouclier thermique RWEB », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « SEIS : configuration pour Mars », Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - La cloche éolienne et thermique WTS », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « L'instrument SEIS - Boitier-electronique », sur SEIS de l'IPGP, Institut de physique du globe de Paris (consulté le ).
- ↑ « SEIS : histoire d'un sismomètre planétaire », Institut de physique du globe de Paris (consulté le ).
- ↑ (de) « GEMS: "Maulwurf" soll das Marsinnere erforschen », Deutsches Zentrum für Luft- und Raumfahrt, .
- (en) « Mission / Science : Heat Flow and Physical Properties Probe », sur JPL InSight Press kit, NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « InSight : technology », NASA/JPL (consulté le ).
- ↑ (en) « Instruments division annual report 2013 » [PDF], NASA/Instruments division, p. 29.
- ↑ (en) « InSight Lander : Roboticarm », sur Site officiel InSight, NASA/Instruments divisio (consulté le ).
- ↑ (en) J. Maki, A. Trebi-Ollennu, R. Deen et al. « The color cameras on the Insight Mars Lander » () (lire en ligne) [PDF]
—49th Lunar and Planetary Science Conference 2018.
Documents de référence
[modifier | modifier le code]Documents de la NASA
[modifier | modifier le code]- (en) NASA, Mars InSight Launch Press Kit, NASA, , 67 p. (lire en ligne [PDF]) Dossier de présentation à la presse de la mission InSight.
- (en) NASA, Mars InSight Landing Press Kit, NASA, , 68 p. (lire en ligne [PDF])Dossier de présentation à la presse de l'atterrissage sur Mars d'InSight
Articles scientifiques (antérieurs à la mission)
[modifier | modifier le code]- (en) Jason P. Marshall et al., « Experimental Investigation of InSight HP3 Mole Interaction with Martian Regolith Simulant », Space Science Reviews, vol. 177, nos 1-4, , p. 1-22 (DOI 10.1007/s11214-016-0329-1, lire en ligne)
- (en) Philippe Lognonné, « From Moon seismology to Mars with the SEIS Instrument on the NASA InSight mission », sur European Geosciences Union, Université Paris Diderot,
- (en) Mark P. Panning, Philippe Lognonné et al., « Planned Products of the Mars Structure Service for the InSight Mission to Mars », Space Science Reviews, , p. 1-59 (DOI 10.1007/s11214-016-0317-5, lire en ligne)
- (en) D. Banfield, « Atmospheric Observations from the Mars InSight Mission », x, , p. 1-2 (lire en ligne)
- (en) W. M. Folkner et al. « The Rotation and Interior Structure Experiment (RISE) for the InSight mission to Mars » () (lire en ligne) [PDF]
—43rd Lunar and Planetary Science Conference - (en) David Mimoun, Philippe Lognonné, William Banerdt et al. « The InSight SEIS Experiment » () (lire en ligne) [PDF]
—43rd Lunar and Planetary Science Conference - (en) J. Maki, A. Trebi-Ollennu, R. Deen et al. « The color cameras on the Insight Mars Lander » () (lire en ligne) [PDF]
—49th Lunar and Planetary Science Conference 2018
Résultats
[modifier | modifier le code]- (en) W. Bruce Banerdt, Suzanne E. Smrekar, Don Banfield, Domenico Giardini et al., « Initial results from the InSight mission on Mars », Nature Geoscience, vol. 13, no (B2):1-7, , p. 1-15 (DOI 10.1038/s41561-020-0544-y, lire en ligne)
- (en) P. Lognonné, W. Banerdt, W. Pike, Domenico Giardini et al., « Constraints on the shallow elastic and anelastic structure of Mars from InSight seismic data », Nature Geoscience, vol. 13, , p. 205-212 (DOI 10.1038/s41561-020-0539-8, lire en ligne)accès payant
- (en) Domenico Giardini, P. Lognonné, W. Banerdt, W. Pike et al., « The seismicity of Mars », Nature Geoscience, vol. 13, no 3, , p. 213-220 (DOI 10.1038/s41561-020-0536-y, lire en ligne)
- (en) M. Golombek, N.H. Warner, J.A Grant et al., « Geology of the InSight landing site on Mars », Nature Communications, vol. 11, no 1014, , p. 213-220 (DOI 10.1038/s41467-020-14679-1, lire en ligne)
- (en) Simon C. Stähler, Amir Khan, W. Bruce Banerdt, Philippe Lognonné, Domenico Giardini et al., « Seismic detection of the martian core », Science, vol. 373, no 6553, , p. 443-448 (DOI 10.1126/science.abi7730, lire en ligne)
- (en) Sanne Cottaar et Paula Koelemeijer, « The interior of Mars revealed », Science, vol. 373, no 6553, , p. 388-399 (DOI 10.1126/science.abj8914, lire en ligne)
Ouvrages généraux
[modifier | modifier le code]- (en) Paolo Ulivi et David M. Harland, Robotic exploration of the solar system : Part 4 : the Modern Era 2004-2013, Springer Praxis, , 567 p. (ISBN 978-1-4614-4811-2), p. 352
Conférence filmée
[modifier | modifier le code]- (en) Troy Lee Hudson « Inside InSight » () (lire en ligne) {{[vidéo] 79 min}}
—Conférences publiques NASA
Autres
[modifier | modifier le code]- (en) Lindy Elkins-Tanton et Lisa May, Mission Concept Study : Planetary Science Decadal Survey Mars Geophysical Network, NASA, , 67 p. (lire en ligne [PDF]) Évaluation d'un projet de 2010 (Mars Geophysical Network) reposant sur l'envoi de deux stations. Étude réalisée dans le cadre du Planetary Science Decadal Survey.
- Marie-Ange Sanguy et Killian Temporel, « Dossier-Insightːla planète rouge en profondeur », Espace & Exploration n°48, , p. 38 à 47 (ISSN 2114-1320)
Voir aussi
[modifier | modifier le code]Articles connexes
[modifier | modifier le code]- Géologie de Mars
- Exploration de Mars
- Farside Seismic Suite expérience incluant une version de l'instrument SEIS qui doit être déposée à la surface de la Lune en 2025.
- NetLander projet annulé de réseau de stations sismiques sur le sol martien
- Phoenix atterrisseur martien dont l'architecture est reprise pour la réalisation d'InSight
- Programme Discovery.
Liens externes
[modifier | modifier le code]Sites/pages des agences spatiales et autres organisations contributrices
[modifier | modifier le code]- (en) InSight, site officiel de la mission, NASA/JPL
- (en) InSight (dossier de presse), JPL
- Site détaillé en français consacré à la mission et à l'instrument SEIS
- InSight, CNES, agence spatiale française qui fournit le sismomètre
- InSight, Institut de physique du globe de Paris (concepteur du sismomètre)
- (de) (titre inconnu), DLR (agence spatiale allemande, qui fournit l'instrument HP3)
Autres sites
[modifier | modifier le code]- Page du site Nirgal.net consacré à Mars et à son exploration
- (en) Page sur le site EO Portal de l'Agence spatiale européenne
Vidéos
[modifier | modifier le code]- (en) NASA Mars InSight Overview , Jet Propulsion Laboratory, NASA, : brève présentation de la mission


 EncycloReader
is supported by the
EncycloReader
is supported by the