Cranes
") From Britannica 11th Edition (1911)
From Britannica 11th Edition (1911) Cranes (so called from the resemblance to the long neck of the bird, cf. Gr. γέρανος, Fr. grue), machines by means of which heavy bodies may be lifted, and also displaced horizontally, within certain defined limits. Strictly speaking, the name alludes to the arm or jib from which the load to be moved is suspended, but it is now used in a wider sense to include the whole mechanism by which a load is raised vertically and moved horizontally. Machines used for lifting only are not called cranes, but winches, lifts or hoists, while the term elevator or conveyor is commonly given to appliances which continuously, not in separate loads, move materials like grain or coal in a vertical, horizontal or diagonal direction (see Conveyors). The use of cranes is of great antiquity, but it is only since the great industrial development of the 19th century, and the introduction of other motive powers than hand labour, that the crane has acquired the important and indispensable position it now occupies. In all places where finished goods are handled, or manufactured goods are made, cranes of various forms are in universal use.
Cranes may be divided into two main classes—revolving and non-revolving. In the first the load can be lifted vertically, and then moved round a central pivot, so as to be deposited at any convenient point within the range. The type of Classification. this class is the ordinary jib crane. In the second class there are, in addition to the lifting motion, two horizontal movements at right angles to one another. The type of this class is the overhead traveller. The two classes obviously represent respectively systems of polar and rectangular coordinates. Jib cranes can be subdivided into fixed cranes and portable cranes; in the former the central-post or pivot is firmly fixed in a permanent position, while in the latter the whole crane is mounted on wheels, so that it may be transported from place to place.
The different kinds of motive power used to actuate cranes—manual, steam, hydraulic, electric—give a further classification. Hand cranes are extremely useful where the load is not excessive, and the quantities to be dealt with are not Motive powers. great; also where speed is not important, and first cost is an essential consideration. The net effective work of lifting that can be performed by a man turning a handle may be taken, for intermittent work, as being on an average about 5000 foot-lb per minute; this is equivalent to 1 ton lifted about 2¼ ft. per minute, so that four men can by a crane raise 1 ton 9 ft. in a minute or 9 tons 1 ft. per minute. It is at once evident that hand power is only suitable for cranes of moderate power, or in cases where heavy loads have to be lifted only very occasionally. This point is dwelt upon, because the speed limitations of the hand-crane are often overlooked by engineers. Steam is an extremely useful motive power for all cranes that are not worked off a central power station. The steam crane has the immense advantage of being completely self-contained. It can be moved (by its own locomotive power, if desired) long distances without requiring any complicated means of conveying power to it; and it is rapid in work, fairly economical, and can be adapted to the most varying circumstances. Where, however, there are a number of cranes all belonging to the same installation, and these are placed so as to be conveniently worked from a central power station, and where the work is rapid, heavy and continuous, as is the case at large ports, docks and railway or other warehouses, experience has shown that it is best to produce the power in a generating station and distribute it to the cranes. Down to the closing decades of the 19th century hydraulic power was practically the only system available for working cranes from a power station. The hydraulic crane is rapid in action, very smooth and silent in working, easy to handle, and not excessive in cost or upkeep,—advantages which have secured its adoption in every part of the world. Electricity as a motive power for cranes is of more recent introduction. The electric transmission of energy can be performed with an efficiency not reached by any other method, and the electric motor readily adapts itself to cranes. When they are worked from a power station the great advantage is gained that the same plant which drives them can be used for many other purposes, such as working machine tools and supplying current for lighting. For dock-side jib cranes the use of electric power is making rapid strides. For overhead travellers in workshops, and for most of the cranes which fall into our second class, electricity as a motive power has already displaced nearly every other method. Cranes driven by shafting, or by mechanical power, have been largely superseded by electric cranes, principally on account of the much greater economy of transmission. For many years the best workshop travellers were those driven by quick running ropes; these performed admirable service, but they have given place to the more modern electric traveller.
 | ||
| Fig. 1. | Fig. 2. | Fig. 3. |
The principal motion in a crane is naturally the hoisting or lifting motion. This is effected by slinging the load to an eye or hook, and elevating the hook vertically. There are three typical methods: (1) A direct pull may be applied to Lifting mechanisms. the hook, either by screws, or by a cylinder fitted with piston and rod and actuated by direct hydraulic or other pressure, as shown diagrammatically in fig. 1. These methods are used in exceptional cases, but present the obvious difficulty of giving a very short range of lift. (2) The hook may be attached to a rope or chain, and the pulling cylinder connected with a system of pulleys around which the rope is led; by these means the lift can be very largely increased. Various arrangements are adopted; the one indicated in fig. 2 gives a lift of load four times the stroke of the cylinder. This second method forms the basis of the lifting gear in all hydraulic cranes. (3) The lifting rope or chain is led over pulley to a lifting barrel, upon which it is coiled as the barrel is rotated by the source of power (fig. 3). Sometimes, especially in the case of overhead travelling cranes for very heavy loads, the chain is a special pitch chain, formed of flat links pinned together, and the barrel is reduced to a wheel provided with teeth, or “sprockets,” which engage in the links. In this case the chain is not coiled, but simply passes over the lifting wheel, the free end hanging loose. All the methods in this third category require a rotating lifting or barrel shaft, and this is the important difference between them and the hydraulic cranes mentioned above. Cranes fitted with rotating hydraulic engines may be considered as coming under the third category.
When the loads are heavy the above mechanisms are supplemented by systems of purchase blocks suspended from the jib or the traveller crab; and in barrel cranes trains of rotating gearing are interposed between the motor, or manual handle, and the barrel (fig. 3).
When a load is lifted, work has to be done in overcoming the action of gravity and the friction of the mechanism; when it is lowered, energy is given out. To control the speed and absorb this energy, brakes have to be provided. The Brakes. hydraulic crane has a great advantage in possessing an almost ideal brake, for by simply throttling the exhaust from the lifting cylinder the speed of descent can be regulated within very wide limits and with perfect safety. Barrel cranes are usually fitted with band brakes, consisting of a brake rim with a friction band placed round it, the band being tightened as required. In ordinary cases conduction and convection suffice to dissipate the heat generated by the brake, but when a great deal of lowering has to be rapidly performed, or heavy loads have to be lowered to a great depth, special arrangements have to be provided. An excellent brake for very large cranes is Matthew’s hydraulic brake, in which water is passed from end to end of cylinders fitted with reciprocating pistons, cooling jackets being provided. In electric cranes a useful method is to arrange the connexions so that the lifting motor acts as a dynamo, and, driven by the energy of the falling load, generates a current which is converted into heat by being passed through resistances. That the quantity of heat to be got rid of may become very considerable is seen when it is considered that the energy of a load of 60 tons descending through 50 ft. is equivalent to an amount of heat sufficient to raise nearly 6 gallons of water from 60° F. to boiling point. Crane brakes are usually under the direct control of the driver, and they are generally arranged in one of two ways. In the first, the pressure is applied by a handle or treadle, and is removed by a spring or weight; this is called “braking on.” In the second, or “braking off” method, the brake is automatically applied by a spring or weight, and is released either mechanically or, in the case of electric cranes, by the pull of a solenoid or magnet which is energized by the current passing through the motor. When the motor starts the brake is released; when it stops, or the current ceases, the brake goes on. The first method is in general use for steam cranes; it allows for a far greater range of power in the brake, but is not automatic, as is the second.
In free-barrel cranes the lifting barrel is connected to the revolving shaft by a powerful friction clutch; this, when interlocked with the brake and controller, renders electric cranes exceedingly rapid in working, as the barrel can be detached and lowering performed at a very high speed, without waiting for the lifting motor to come to rest in order to be reversed. This method of working is very suitable for electric dock-side cranes of capacities up to about 5 or 7 tons, and for overhead travellers where the height of lift is moderate. Where high speed lowering is not required it is usual to employ a reversing motor and keep it always in gear.
In steam cranes it is usual to work all the motions from one double cylinder engine. In order to enable two or more motions to be worked together, or independently as required, reversing friction cones are used for the subsidiary motions, especially the slewing motion. With the exception of a few special cranes in which friction wheels are employed, it is universally the practice, in steam cranes, to connect the engine shaft with the barrel shaft by spur toothed gearing, the gear being connected or disconnected by sliding pinions. In electric cranes the motor is connected to the barrel, either in a similar manner by spur gear or by worm gear. The toothed wheels give a slightly better efficiency, but the worm gear is somewhat smoother in its action and entirely silent; the noise of gearing can, however, be considerably reduced by careful machining of the teeth, as is now always done, and also by the use of pinions made of rawhide leather or other non-resonant material. When quick-running metal pinions are used they are arranged to run in closed oil-baths. Leather pinions must be protected from rats, which eat them freely. Worm wheel gearing is of very high efficiency if made very quick in pitch, with properly formed teeth perfectly lubricated, and with the end thrust of the worm taken on ball bearings. Much attention has been paid to the improvement of the mechanical details of the lifting and other motions of cranes, and in important installations the gearing is now usually made of cast steel. In revolving cranes ease of slewing can be greatly increased by the use of a live ring of conical rollers.
Electric motors for barrel cranes are not essentially different from those used for other purposes, but in proportioning the sizes the intermittent output has to be taken into consideration. This fact has led to the introduction of the “crane rated” Power required. motor, with a given “load factor.” This latter gives the ratio of the length of the working periods to the whole time; e.g. a motor rated for a quarter load factor means that the motor is capable of exerting its full normal horse-power for three minutes out of every twelve, the pause being nine minutes, or one minute out of every four, the pause being three minutes. The actual load factor to be chosen depends on the nature of the work and the kind of crane. A dock-side crane unloading cargo with high lifts following one another in rapid succession will require a higher load factor than a workshop traveller with a very short lift and only a very occasional maximum load; and a traveller with a very long longitudinal travel will require a higher load factor for the travelling motor than for the lifting motor. In practice, the load factor for electric crane motors varies from 1⁄3 to 1⁄6. In steam cranes much the same principle obtains in proportioning the boiler; e.g. the engines of a 10-ton steam crane have cylinders capable of indicating about 60 horse-power when working at full speed, but it is found that, in consequence of the intermittent working, sufficient steam can be supplied with a boiler whose heating surface is only 1⁄3 to ¼ of that necessary for the above power, when developed continuously by a stationary engine.
In well-designed, quick-running cranes the mechanical efficiency of the lifting gear may be taken as about 85%; a good electric jib crane will give an efficiency of 72%, i.e. when actually lifting at full speed the mechanical work of lifting represents about 72% of the electric energy put into the lifting motor. A very convenient rule is to allow one brake horse-power of motor for every 10 foot-tons of work done at the hook: this is equivalent to an efficiency of 662⁄3%, and is well on the safe side.
The motor in most common use for electric cranes is the series wound, continuous current motor, which has many advantages. It has a very large starting torque, which enables it to overcome the inertia of getting the load into motion, and it lifts heavy loads at a slower speed and lighter loads at a quicker one, behaving, under the action of the controller in a somewhat similar manner to that in which the cylinders of the steam crane respond to the action of the stop-valve. Three-phase motors are also much used for crane-driving, and it is probable that improvements in single and two-phase motors will eventually largely increase their use for this class of work.
Tests of the comparative efficiencies of hydraulic and electric cranes tend to show that, although they do not vary to any very considerable extent with full load, yet the efficiency of the hydraulic crane falls away very much more rapidly than that of the electric crane when working on smaller loads. This drawback can be corrected to a slight extent by furnishing the hydraulic crane with more than one cylinder, and thus compounding it, but the arrangement does not give the same economical range of load as in an electric crane. In first cost the hydraulic crane has the advantage, but the power mains are much less expensive and more convenient to arrange in the electric crane.
The limit of speed of lift of hand cranes has already been mentioned; for steam jib cranes average practice is represented by the formula V = 30 + 200/T, where V is the speed of lift in feet per minute, and T the load in tons. Where electric Speed. or hydraulic cranes are worked from a central station the speed is greater, and may be roughly represented by V = 5 + 300/T; e.g. a 30-cwt. crane would lift with a speed of about 200 ft. per minute, and 100-ton crane with a speed of about 8 ft. per minute, but these speeds vary with local circumstances. The lifting speed of electric travellers is generally less, because the lift is generally much shorter, and may in ordinary cases be taken as V = 3 + 85/T. The cross-traversing speed of travellers varies from 60 to 120 ft. per minute, and the longitudinal from 100 to 300 ft. per minute. The speed of these two motions depends much on the length of the span and of the longitudinal run, and on the nature of the work to be done; in certain cases, e.g. foundries, it is desirable to be able to lift, on occasions, at an extremely slow speed. In addition to the brakes on the lifting gear of cranes it is found necessary, especially in quick-running electric cranes, to provide a brake on the subsidiary motions, and also devices to stop the motor at the end of the lift or travel, so as to prevent over-running.
There are many other important points of crane construction too numerous to mention here, but it may be said generally that the advent of electricity has tended to increase speeds, and in consequence great attention is paid to all details that reduce friction and wear, such as roller and ball bearings and improved methods of lubrication; and, as in all other quick-running machinery, great stress has to be laid on accuracy of workmanship. The machinery, thus being of a higher class, requires more protection, and cranes that work in the open are now fitted with elaborate crane-houses or cabins, furnished with weather-tight doors and windows, and more care is taken to provide proper platforms, hand-rails and ladders of access, and also guards for the revolving parts of gearing.
 | |
| Fig. 4. | Fig. 5. |
Typical Forms of Cranes.—Fig. 4 is a diagram of a fixed hand revolving jib crane, of moderate size, as used in railway goods yards and similar places. It consists of a heavy base, which is securely bolted to the foundation, and which carries the Fixed Cranes. strong crane-post, or pillar, around which the crane revolves. The revolving part is made with two side frames of cast iron or steel plates, and to these the lifting gear is attached. The load is suspended from the crane jib; this jib is attached at the lower end to the side frames, and the upper end is supported by tie-rods, connected to the framework, the whole revolving together. This simple form of crane thus embodies the essential elements of foundation, post, framework, jib, tie-rods and gearing.
Fig. 5 shows another type of fixed crane, known as a derrick crane. Here the crane-post is extended into a long mast and is furnished with pivots at the top and bottom; the mast is supported by two “back ties,” and these are connected to the socket of the bottom pivot by the “sleepers.” This is a very good and comparatively cheap form of crane, where a long and variable radius is required, but it cannot slew through a complete circle. Derrick cranes are made of all powers, from the timber 1-ton hand derrick to the steel 150-ton derrick used in shipbuilding yards. The derrick crane introduces a problem for which many solutions have been sought, that of preventing the load from being lifted or lowered when the jib is pivoted up or down to alter the radius. To keep the load level, there are various devices for automatically coupling the jib-raising and the load-lowering motions.
 |
| Fig. 6. |
Somewhat allied to the derrick are the sheer legs (fig. 6). Here the place of the jib is taken by two inclined legs joined together at the top and pivoted at the bottom; a third back-leg is connected at the top to the other two, and at the bottom is coupled to a nut which runs on a long horizontal screw. This horizontal movement of the lower end of the back leg allows the whole arrangement to assume the position shown in fig. 7, so that a load can be taken out of a vessel and deposited on a quay wall. The same effect can be produced by shortening the back leg by a screw placed in the direction of its length. Sheer legs are generally built in very large sizes, and their use is practically confined to marine work.
 | |
| Fig. 7. | Fig. 8. |
Another type of fixed crane is the “Fairbairn” crane, shown in fig. 8. Here the jib, superstructure and post are all united in one piece, which revolves in a foundation well, being supported at the bottom by a toe-step and near the ground level by horizontal rollers. This type of crane used to be in great favour, in consequence of the great clearance it gives under the jib, but it is expensive and requires very heavy foundations.
The so-called “hammer-headed” crane (fig. 9) consists of a steel braced tower, on which revolves a large horizontal double cantilever; the forward part of this cantilever or jib carries the lifting crab, and the jib is extended backwards in order to form a support for the machinery and counter-balance. Besides the motions of lifting and revolving, there is provided a so-called “racking” motion, by which the lifting crab, with the load suspended, can be moved in and out along the jib without altering the level of the load. Such horizontal movement of the load is a marked feature of later crane design; it first became prominent in the so-called “Titan” cranes, mentioned below (fig. 14). Hammer-headed cranes are generally constructed in large sizes, up to 200 tons.
 | |
| Fig. 9. | Fig. 10. |
Another type of fixed revolving crane is the foundry or smithy crane (fig. 10). It has the horizontal racking motion mentioned above, and revolves either on upper and lower pivots supported by the structure of the workshop, or on a fixed pillar secured to a heavy foundation. The type is often used in foundries, or to serve heavy hammers in a smithy, whence the name.
Portable cranes are of many kinds. Obviously, nearly every kind of crane can be made portable by mounting it on a carriage, fitted with wheels; it is even not unusual to make the Portable cranes. Scottish derrick portable by using three trucks, one under the mast, and the others under the two back legs.
Fig. 11 represents a portable steam jib crane; it contains the same elements as the fixed crane (fig. 4), but the foundation bed is mounted on a truck which is carried on railway or road wheels. With portable cranes means must be provided to ensure the requisite stability against overturning; this is done by weighting the tail of the revolving part with heavy weights, and in steam cranes the boiler is so placed as also to form part of the counterbalance. Where the rail-gauge is narrow and great weight is not desired, blocking girders are provided across the under side of the truck; these are arranged so that, by means of wedges or screws, they can be made to increase the base. In connexion with the stability of portable cranes, it may be mentioned that accidents more often arise from overturning backwards than forwards. In the latter case the overturning tendency begins as soon as the load leaves the ground, but ceases as soon as the load again touches the ground and thus relieves the crane of the extra weight, whereas overturning backwards is caused either by the reaction of a chain breaking or by excessive counterweight. When portable cranes are fitted with springs and axle-boxes, drawgear and buffers, so that they can be coupled to an ordinary railway train, they are called “breakdown” or “wrecking” cranes.
 | |
| Fig. 11. | Fig. 12. |
 |
| Fig. 13. |
 |
| Fig. 14. |
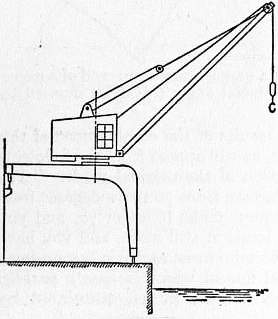
Dock-side jib cranes for working general cargo are almost always made portable, in order to enable them to be placed in correct position in regard to the hatchways of the vessels which they serve. Fig. 12 shows an ordinary hydraulic dock-side jib crane. This type is usually fitted with a very high jib, so as to lift goods in and out of high-sided vessels. The hydraulic lifting cylinders are placed inside the revolving steel mast or post, and the cabin for the driver is arranged high up in the front of the post, so as to give a good view of the work. The pressure is conveyed to the crane by means of jointed “walking” pipes, or flexible hose, connected to hydrants placed at regular intervals along the quay. It is often very desirable to have the quay space as little obstructed by the cranes as possible, so as not to interfere with railway traffic; this has led to the introduction of cranes mounted on high trucks or gantries, sometimes also called “portal” cranes. Where warehouses or station buildings run parallel to the quay line, the high truck is often extended, so as to span the whole quay; on one side the “long leg” runs on a rail at the quay edge, and on the other the “short leg” runs on a runway placed on the building. Cranes of this type are called “half-portal” cranes. Fig. 13 shows an electric crane of this class. They give the minimum of interference with quay space and have rapidly come into favour. Where the face of the warehouse is sufficiently close to the water to permit of the crane rope plumbing the hatches without requiring a jib of excessive radius, it is a very convenient plan to place the whole crane on the warehouse roof.
A special form of jib crane, designed to meet a particular purpose, is the “Titan” (fig. 14) largely used in the construction of piers and breakwaters. It contains all the essential elements of the hammer-headed crane, of which it may be considered to be the parent; in fact, the only essential difference is that the Titan is portable and the hammer-head crane fixed. The Titan was the first type of large portable crane in which full use was made of a truly horizontal movement of the load; for the purpose for which the type is designed, viz. setting concrete blocks in courses, this motion is almost a necessity.
 | |
| Fig. 15. | Fig. 16. |
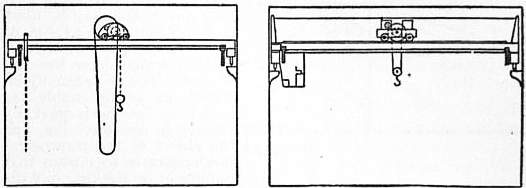
As types of non-revolving cranes, fig. 15 shows an overhead traveller worked by hand, and fig. 16 a somewhat similar machine worked by electric power. The principal component parts of a traveller are the main cross girders forming the Non-revolving cranes. bridge, the two end carriages on which the bridge rests, the running wheels which enable the end carriages to travel on the longitudinal gantry girders or runway, and the crab or jenny, which carries the hoisting mechanism, and moves across the span on rails placed on the bridge girders. There are numerous and important variations of these two types, but the above contain the elements out of which most cranes of the class are built.
 | |
| Fig. 17. | Fig. 18. |
 |
| Fig. 19. |
 |
| Fig. 20. |
One variation is illustrated in fig. 17, and is called a “Goliath” or “Wellington.” It is practically a traveller mounted on high legs, so as to permit of its being travelled on rails placed on the ground level, instead of on an elevated gantry. Of other variations and combinations of types, fig. 18 shows a modern design of crane intended to command the maximum of yard space, and having some of the characteristics both of the Goliath and of the revolving jib crane, and fig. 19 depicts a combination of a traveller and a hanging jib crane.
When the cross traverse motion of a traveller crab is suppressed, and the longitudinal travelling motion is increased in importance we come to a type of crane, the use of which is rapidly increasing; it goes by the name of “transporter.” Transporters can only move the load to any point on a vertical Transporters. surface (generally a plane surface); they have a lifting motion and a movement of translation. They are of two kinds: (1) those in which the motive power and lifting gear are self-contained on the crab; and (2) those in which the motive power is placed in a fixed position. A transporter of the first class is shown in fig. 20. From the lower flange of a suspended runway, made of a single I section, run wheels, from the axles of which the transporter is suspended. The latter consists of a framework carrying the hoisting barrel, with its driving motor and gearing, and a travelling motor, which is geared to the running wheels in such a manner as to be able to propel the whole machine; a seat is provided for the driver who manipulates the controllers. A transporter of this kind, when fitted with a grab, is a very efficient machine for taking coal from barges and depositing it in a coal store.
 |
| Fig. 21. |
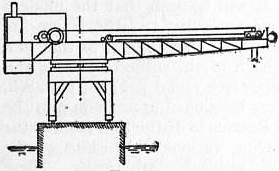
In the other class of transporter the load is not usually moved through such long distances. It consists essentially of a jib made of single I-sections, and supported by tie-rods (fig. 21), the load to be lifted being suspended from a small travelling carriage which runs on the lower flange. The lifting gear is located in any convenient fixed position. In order that only one motor may be used, and also that the load may be lifted by a single part of rope, various devices have been invented. The jib is usually inclined, so as to enable the travel to be performed by gravity in one direction, and the object of the transporter mechanism is to ensure that pulling in or slacking out the lifting rope shall perform the cycle of operations in the following order:—Supposing the load is ready to be lifted out of a vessel on to a quay, the pull of the lifting rope raises the load, the travelling jenny being meanwhile locked in position. On arriving at a certain height the lift ceases and the jenny is released, and by the continued pull of the rope, it runs up the jib; on arriving at an adjustable stop, the jenny is again locked, and the load can be lowered out; the hook can then be raised, when the jenny is automatically unlocked, and on paying out the rope the jenny gravitates to its first position, when the load is lowered and the cycle repeated. The jibs of transporters are often made to slide forward, or lift up, so as to be out of the way when not in use. Transporters are largely used for dealing with general cargo between vessels and warehouses, and also for coaling vessels; they have a great advantage in not interfering with the rigging of vessels.
Nearly all recent advances in crane design are the result of the introduction of the electric motor. It is now possible to apply motive power exactly where it is wanted, and to do so economically, so that the crane designer has a perfectly free hand in adding the various motions required by the special circumstances of each case.
The literature which deals specially with cranes is not a large one, but there are some good German text-books on the subject, amongst which may be mentioned Die Hebezeuge by Ernst (4th ed., Berlin, 1903), and Cranes, by Anton Böttcher, translated with additions by A. Tolhausen (London, 1908).
↧ Download as ZWI file | Last modified: 11/17/2022 15:24:11 | 92 views
☰ Source: https://oldpedia.org/article/britannica11/Cranes | License: Public domain in the USA. Project Gutenberg License
 ZWI signed:
ZWI signed: