Lens
") From Britannica 11th Edition (1911)
From Britannica 11th Edition (1911) Lens (from Lat. lens, lentil, on account of the similarity of the form of a lens to that of a lentil seed), in optics, an instrument which refracts the luminous rays proceeding from an object in such a manner as to produce an image of the object. It may be regarded as having four principal functions: (1) to produce an image larger than the object, as in the magnifying glass, microscope, &c.; (2) to produce an image smaller than the object, as in the ordinary photographic camera; (3) to convert rays proceeding from a point or other luminous source into a definite pencil, as in lighthouse lenses, the engraver’s globe, &c.; (4) to collect luminous and heating rays into a smaller area, as in the burning glass. A lens made up of two or more lenses cemented together or very close to each other is termed “composite” or “compound”; several lenses arranged in succession at a distance from each other form a “system of lenses,” and if the axes be collinear a “centred system.” This article is concerned with the general theory of lenses, and more particularly with spherical lenses. For a special part of the theory of lenses see Aberration; the instruments in which the lenses occur are treated under their own headings.
The most important type of lens is the spherical lens, which is a piece of transparent material bounded by two spherical surfaces, the boundary at the edge being usually cylindrical or conical. The line joining the centres, C1, C2 (fig. 1), of the bounding surfaces is termed the axis; the points S1, S2, at which the axis intersects the surfaces, are termed the “vertices” of the lens; and the distance between the vertices is termed the “thickness.” If the edge be everywhere equidistant from the vertex, the lens is “centred.”
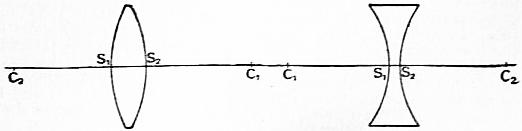 |
| Fig. 1. |
Although light is really a wave motion in the aether, it is only necessary, in the investigation of the optical properties of systems of lenses, to trace the rectilinear path of the waves, i.e. the direction of the normal to the wave front, and this can be done by purely geometrical methods. It will be assumed that light, so long as it traverses the same medium, always travels in a straight line; and in following out the geometrical theory it will always be assumed that the light travels from left to right; accordingly all distances measured in this direction are positive, while those measured in the opposite direction are negative.
Theory of Optical Representation.—If a pencil of rays, i.e. the totality of the rays proceeding from a luminous point, falls on a lens or lens system, a section of the pencil, determined by the dimensions of the system, will be transmitted. The emergent rays will have directions differing from those of the incident rays, the alteration, however, being such that the transmitted rays are convergent in the “image-point,” just as the incident rays diverge from the “object-point.” With each incident ray is associated an emergent ray; such pairs are termed “conjugate ray pairs.” Similarly we define an object-point and its image-point as “conjugate points”; all object-points lie in the “object-space,” and all image-points lie in the “image-space.”
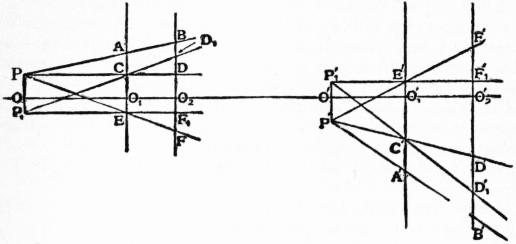 |
| Fig. 2. |
The laws of optical representations were first deduced in their most general form by E. Abbe, who assumed (1) that an optical representation always exists, and (2) that to every point in the object-space there corresponds a point in the image-space, these points being mutually convertible by straight rays; in other words, with each object-point is associated one, and only one, image-point, and if the object-point be placed at the image-point, the conjugate point is the original object-point. Such a transformation is termed a “collineation,” since it transforms points into points and straight lines into straight lines. Prior to Abbe, however, James Clerk Maxwell published, in 1856, a geometrical theory of optical representation, but his methods were unknown to Abbe and to his pupils until O. Eppenstein drew attention to them. Although Maxwell’s theory is not so general as Abbe’s, it is used here since its methods permit a simple and convenient deduction of the laws.
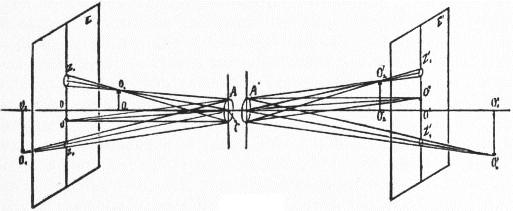
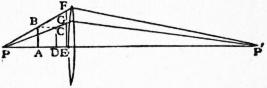
Maxwell assumed that two object-planes perpendicular to the axis are represented sharply and similarly in two image-planes also perpendicular to the axis (by “sharply” is meant that the assumed ideal instrument unites all the rays proceeding from an object-point in one of the two planes in its image-point, the rays being generally transmitted by the system). The symmetry of the axis being premised, it is sufficient to deduce laws for a plane containing the axis. In fig. 2 let O1, O2 be the two points in which the perpendicular object-planes meet the axis; and since the axis corresponds to itself, the two conjugate points O′1, O′2, are at the intersections of the two image-planes with the axis. We denote the four planes by the letters O1, O2, and O′1, O′2. If two points A, C be taken in the plane O1, their images are A′, C′ in the plane O′1, and since the planes are represented similarly, we have O′1A′:O1A = O′1C′1:O1C = β1 (say), in which β1 is easily seen to be the linear magnification of the plane-pair O1, O′1. Similarly, if two points B, D be taken in the plane O2 and their images B′, D′ in the plane O′2, we have O′2B′:O2B = O′2D′:O2D = β2 (say), β2 being the linear magnification of the plane-pair O2, O′2. The joins of A and B and of C and D intersect in a point P, and the joins of the conjugate points similarly determine the point P′.
If P′ is the only possible image-point of the object-point P, then the conjugate of every ray passing through P must pass through P′. To prove this, take a third line through P intersecting the planes O1, O2 in the points E, F, and by means of the magnifications β1, β2 determine the conjugate points E′, F′ in the planes O′1, O′2. Since the planes O1, O2 are parallel, then AC/AE = BD/BF; and since these planes are represented similarly in O′1, O′2, then A′C′/A′E′ = B′D′/B′F′. This proportion is only possible when the straight line E′F′ contains the point P′. Since P was any point whatever, it follows that every point of the object-space is represented in one and only one point in the image-space.
Take a second object-point P1, vertically under P and defined by the two rays CD1, and EF1, the conjugate point P′1 will be determined by the intersection of the conjugate rays C′D′1 and E′F′1, the points D′1, F′1, being readily found from the magnifications β1, β2. Since PP1 is parallel to CE and also to DF, then DF = D1F1. Since the plane O2 is similarly represented in O′2, D′F′ = D′1F′1; this is impossible unless P′P′1 be parallel to C′E′. Therefore every perpendicular object-plane is represented by a perpendicular image-plane.
Let O be the intersection of the line PP1 with the axis, and let O′ be its conjugate; then it may be shown that a fixed magnification β3 exists for the planes O and O′. For PP1/FF1 = OO1/O1O2, P′P′1/F′F′1 = O′O′/O′1O′2, and F′F′1 = β2FF1. Eliminating FF1 and F′F′1 between these ratios, we have P′P′1/PP1β2 = O′O′1·O1O2/OO1. O′1O′2, or β3 = β2·O′O′1·O1O2/OO1·O′1O′2, i.e. β3 = β2 × a product of the axial distances.
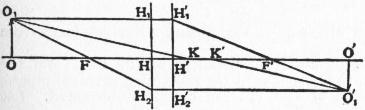
The determination of the image-point of a given object-point is facilitated by means of the so-called “cardinal points” of the optical system. To determine the image-point O′1 (fig. 3) corresponding to the object-point O1, we begin by choosing from the ray pencil proceeding from O1, the ray parallel with the axis, i.e. intersecting the axis at infinity. Since the axis is its own conjugate, the parallel ray through O1 must intersect the axis after refraction (say at F′). Then F′ is the image-point of an object-point situated at infinity on the axis, and is termed the “second principal focus” (German der bildseitige Brennpunkt, the image-side focus). Similarly if O′4 be on the parallel through O1 but in the image-space, then the conjugate ray must intersect the axis at a point (say F), which is conjugate with the point at infinity on the axis in the image-space. This point is termed the “first principal focus” (German der objektseitige Brennpunkt, the object-side focus).
Let H1, H′1 be the intersections of the focal rays through F and F′ with the line O1O′4. These two points are in the position of object and image, since they are each determined by two pairs of conjugate rays (O1H1 being conjugate with H′1F′, and O′4H′1 with H1F). It has already been shown that object-planes perpendicular to the axis are represented by image-planes also perpendicular to the axis. Two vertical planes through H1 and H′1, are related as object- and image-planes; and if these planes intersect the axis in two points H and H′, these points are named the “principal,” or “Gauss points” of the system, H being the “object-side” and H′ the “image-side principal point.” The vertical planes containing H and H′ are the “principal planes.” It is obvious that conjugate points in these planes are equidistant from the axis; in other words, the magnification β of the pair of planes is unity. An additional characteristic of the principal planes is that the object and image are direct and not inverted. The distances between F and H, and between F′ and H′ are termed the focal lengths; the former may be called the “object-side focal length” and the latter the “image-side focal length.” The two focal points and the two principal points constitute the so-called four cardinal points of the system, and with their aid the image of any object can be readily determined.
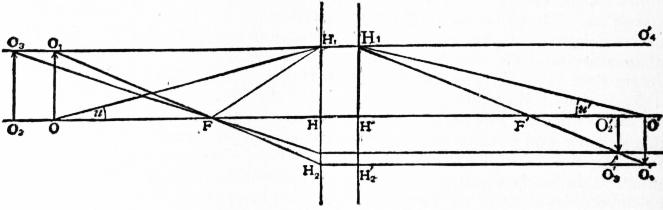 |
| Fig. 3. |
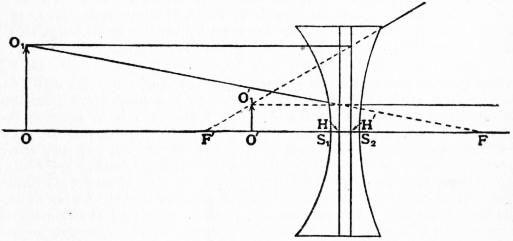
Equations relating to the Focal Points.—We know that the ray proceeding from the object point O1, parallel to the axis and intersecting the principal plane H in H1, passes through H′1 and F′. Choose from the pencil a second ray which contains F and intersects the principal plane H in H2; then the conjugate ray must contain points corresponding to F and H2. The conjugate of F is the point at infinity on the axis, i.e. on the ray parallel to the axis. The image of H2 must be in the plane H′ at the same distance from, and on the same side of, the axis, as in H′2. The straight line passing through H′2 parallel to the axis intersects the ray H′1F′ in the point O′1, which must be the image of O1. If O be the foot of the perpendicular from O1 to the axis, then OO1 is represented by the line O′O′1 also perpendicular to the axis.
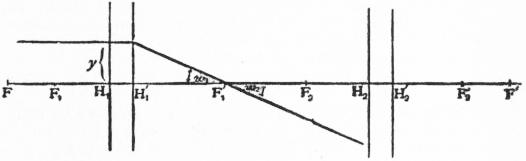
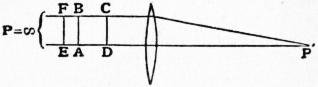
This construction is not applicable if the object or image be infinitely distant. For example, if the object OO1 be at infinity (O being assumed to be on the axis for the sake of simplicity), so that the object appears under a constant angle w, we know that the second principal focus is conjugate with the infinitely distant axis-point. If the object is at infinity in a plane perpendicular to the axis, the image must be in the perpendicular plane through the focal point F′ (fig. 4).
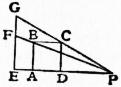
The size y′ of the image is readily deduced. Of the parallel rays from the object subtending the angle w, there is one which passes through the first principal focus F, and intersects the principal plane H in H1. Its conjugate ray passes through H′ parallel to, and at the same distance from the axis, and intersects the image-side focal plane in O′1; this point is the image of O1, and y′ is its magnitude. From the figure we have tan w = HH1/FH = y′/f, or f = y′/tan w; this equation was used by Gauss to define the focal length.
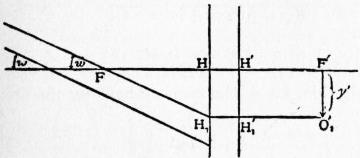 |
| Fig. 4. |
Referring to fig. 3, we have from the similarity of the triangles OO1F and HH2F, HH2/OO1 = FH/FO, or O′O′1/OO1 = FH/FO. Let y be the magnitude of the object OO1, y′ that of the image O′O′1, x the focal distance FO of the object, and f the object-side focal distance FH; then the above equation may be written y′/y = f/x. From the similar triangles H′1H′F′ and O′1O′F′, we obtain O′O′1/OO1 = F′O′/F′H′. Let x′ be the focal distance of the image F′O′, and f′ the image-side focal length F′H′; then y′/y = x′/f′. The ratio of the size of the image to the size of the object is termed the lateral magnification. Denoting this by β, we have
β = y′/y = f/x = x′/f′,
and also
xx′ = ff′.
By differentiating equation (2) we obtain
dx′= −(ff′/x2) dx or dx′/dx = −ff′/x2.
The ratio of the displacement of the image dx′ to the displacement of the object dx is the axial magnification, and is denoted by α. Equation (3) gives important information on the displacement of the image when the object is moved. Since f and f′ always have contrary signs (as is proved below), the product −ff′ is invariably positive, and since x2 is positive for all values of x, it follows that dx and dx′ have the same sign, i.e. the object and image always move in the same direction, either both in the direction of the light, or both in the opposite direction. This is shown in fig. 3 by the object O3O2 and the image O′3O′2.
If two conjugate rays be drawn from two conjugate points on the axis, making angles u and u′ with the axis, as for example the rays OH1, O′H′1, in fig. 3, u is termed the “angular aperture for the object,” and u′ the “angular aperture for the image.” The ratio of the tangents of these angles is termed the “convergence” and is denoted by γ, thus γ = tan u′/tan u. Now tan u′= H′H′1/O′H′ = H′H′1/(O′F′ + F′H′) = H′H′1/(F′H′ − F′O′). Also tan u = HH1/OH = HH1/(OF + FH) = HH1/(FH − FO). Consequently γ = (FH − FO)/(F′H′ − F′O′), or, in our previous notation, γ = (f − x)/(f′ − x′).
From equation (1) f/x = x′/f′, we obtain by subtracting unity from both sides (f − x)/x = (x′ − f′)/f′, and consequently
| f − x | = − | x | = − | f | = γ. |
| f′ − x′ | f′ | x′ |
From equations (1), (3) and (4), it is seen that a simple relation exists between the lateral magnification, the axial magnification and the convergence, viz. αγ = β.
 |
| Fig. 5. |
In addition to the four cardinal points F, H, F′, H′, J. B. Listing, “Beiträge aus physiologischen Optik,” Göttinger Studien (1845) introduced the so-called “nodal points” (Knotenpunkte) of the system, which are the two conjugate points from which the object and image appear under the same angle. In fig. 5 let K be the nodal point from which the object y appears under the same angle as the image y′ from the other nodal point K′. Then OO1/KO = O′O′1/K′O′, or OO1/(KF + FO) = O′O′1/(K′F′+ F′O′), or OO1/(FO − FK) = O′O′1/(F′O′− F′K′). Calling the focal distances FK and F′K′, X and X′, we have y/(x − X) = y′/(x′− X′), and since y′/y = β, it follows that 1/(x − X) = β/(x′− X′). Replace x′ and X′ by the values given in equation (2), and we obtain
| 1 | = β / ( | ff′ | − | ff′ | ) or 1 = −β | xX | . |
| x − X | x | X | ff′ |
Since β = f/x = x′/f′, we have f′ = −X, f = −X′.
These equations show that to determine the nodal points, it is only necessary to measure the focal distance of the second principal focus from the first principal focus, and vice versa. In the special case when the initial and final medium is the same, as for example, a lens in air, we have f = −f′, and the nodal points coincide with the principal points of the system; we then speak of the “nodal point property of the principal points,” meaning that the object and corresponding image subtend the same angle at the principal points.
Equations Relating to the Principal Points.—It is sometimes desirable to determine the distances of an object and its image, not from the focal points, but from the principal points. Let A (see fig. 3) be the principal point distance of the object and A′ that of the image, we then have
A = HO = HF + FO = FO − FH = x − f,
A′ = H′O′ = H′F′ + F′O′ = F′O′ − F′H′ = x′ − f′,
whence
x = A + f and x′ = A′ + f′.
Using xx′ = ff′, we have (A + f)(A′ + f′) = ff′, which leads to AA′ + Af′ + A′f = O, or
| 1 + | f′ | + | f | = O; |
| A′ | A |
this becomes in the special case when f = -f′,
| 1 | − | 1 | = | 1 | . |
| A′ | A | f |
To express the linear magnification in terms of the principal point distances, we start with equation (4) (f − x)/(f′ − x′) = −x/f′. From this we obtain A/A′ = -x/f′, or x = −f′A/A′; and by using equation (1) we have β = −fA′/f′A.
In the special case of f = −f′, this becomes β = A′/A = y′/y, from which it follows that the ratio of the dimensions of the object and image is equal to the ratio of the distances of the object and image from the principal points.
The convergence can be determined in terms of A and A′ by substituting x = −f′A/A′ in equation (4), when we obtain γ = A/A′.
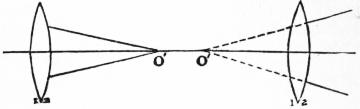
Compound Systems.—In discussing the laws relating to compound systems, we assume that the cardinal points of the component systems are known, and also that the combinations are centred, i.e. that the axes of the component lenses coincide. If some object be represented by two systems arranged one behind the other, we can regard the systems as co-operating in the formation of the final image.
 |
| Fig. 6. |
Let such a system be represented in fig. 6. The two single systems are denoted by the suffixes 1 and 2; for example, F1 is the first principal focus of the first, and F′2 the second principal focus of the second system. A ray parallel to the axis at a distance y passes through the second principal focus F′1 of the first system, intersecting the axis at an angle w′1. The point F′1 will be represented in the second system by the point F′, which is therefore conjugate to the point at infinity for the entire system, i.e. it is the second principal focus of the compound system. The representation of F′1 in F′ by the second system leads to the relations F2F′1 = x2, and F′2F′ = x′2, whence x2x′2 = f2f′2. Denoting the distance between the adjacent focal planes F′1, F2 by Δ, we have Δ = F′1F2 = −F2F′1, so that x′2 = -f2f′2/Δ. A similar ray parallel to the axis at a distance y proceeding from the image-side will intersect the axis at the focal point F2; and by finding the image of this point in the first system, we determine the first principal focus of the compound system. Equation (2) gives x1x′1 = f1f′1, and since x′1 = F′1F2 = Δ, we have x1 = f1f′1/Δ as the distance of the first principal focus F of the compound system from the first principal focus F1 of the first system.
To determine the focal lengths f and f′ of the compound system and the principal points H and H′, we employ the equations defining the focal lengths, viz. f = y′/tan w, and f′ = y/tan w′. From the construction (fig. 6) tan w′1 = y/f′1. The variation of the angle w′1 by the second system is deduced from the equation to the convergence, viz. γ = tan w′2/tan w2 = −x2/f′2 = Δ/f′2, and since w2 = w′1, we have tan w′2 = (Δ/f′2) tan w′1. Since w′ = w′2 in our system of notation, we have
| f′ = | y | = | yf′2 | = | f′1·f′2 | . |
| tan w′ | Δ tan w′1 | Δ |
By taking a ray proceeding from the image-side we obtain for the first principal focal distance of the combination
f = −f1f2/Δ.
In the particular case in which Δ = 0, the two focal planes F′1, F2 coincide, and the focal lengths f, f′ are infinite. Such a system is called a telescopic system, and this condition is realized in a telescope focused for a normal eye.
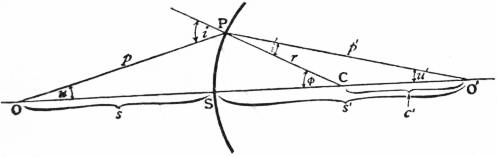
So far we have assumed that all the rays proceeding from an object-point are exactly united in an image-point after transmission through the ideal system. The question now arises as to how far this assumption is justified for spherical lenses. To investigate this it is simplest to trace the path of a ray through one spherical refracting surface. Let such a surface divide media of refractive indices n and n′, the former being to the left. The point where the axis intersects the surface is the vertex S (fig. 7). Denote the distance of the axial object-point O from S by s; the distance from O to the point of incidence P by p; the radius of the spherical surface by r; and the distance OC by c, C being the centre of the sphere. Let u be the angle made by the ray with the axis, and i the angle of incidence, i.e. the angle between the ray and the normal to the sphere at the point of incidence. The corresponding quantities in the image-space are denoted by the same letters with a dash. From the triangle O′PC we have sin u = (r/c) sin i, and from the triangle O′PC we have sin u′ = (r/c′) sin i′. By Snell’s law we have n′/n = sin i/sin i′, and also φ = u′ + i′. Consequently c′ and the position of the image may be found.
 |
| Fig. 7. |
To determine whether all the rays proceeding from O are refracted through O′, we investigate the triangle OPO′. We have p/p′ = sin u′/sin u. Substituting for sin u and sin u′ the values found above, we obtain p′/p = c′ sin i/c sin i′ = n′c′/nc. Also c = OC = CS + SO = −SC + SO = s − r, and similarly c′ = s′ − r. Substituting these values we obtain
| p′ | = | n′(s′ − r) | , or | n(s − r) | = | n′(s′ − r) | . |
| p | n(s − r) | p | p′ |
To obtain p and p′ we use the triangles OPC and O′PC; we have p2 = (s − r)2 + r2 + 2r(s − r) cos φ, p′2 = (s′ − r)2 + r2 + 2r(s′ − r) cos φ. Hence if s, r, n and n′ be constant, s′ must vary as φ varies. The refracted rays therefore do not reunite in a point, and the deflection is termed the spherical aberration (see Aberration).
Developing cos φ in powers of φ, we obtain
| p2 = (s − r)2 + r2 + 2r(s − r) { 1 − | φ2 | + | φ4 | − | φ6 | + ... }, |
| 2! | 4! | 6! |
and therefore for such values of φ for which the second and higher powers may be neglected, we have p2 = (s − r)2 + r2 + 2r(s − r), i.e. p = s, and similarly p′ = s′. Equation (6) then becomes n(s − r)/s = n′(s′ − r)/s′ or
| n′ | = | n | + | n′ − n | . |
| s′ | s | r |
This relation shows that in a very small central aperture in which the equation p = s holds, all rays proceeding from an object-point are exactly united in an image-point, and therefore the equations previously deduced are valid for this aperture. K. F. Gauss derived the equations for thin pencils in his Dioptrische Untersuchungen (1840) by very elegant methods. More recently the laws relating to systems with finite aperture have been approximately realized, as for example, in well-corrected photographic objectives.
Position of the Cardinal Points of a Lens.—Taking the case of a single spherical refracting surface, and limiting ourselves to the small central aperture, it is seen that the second principal focus F′ is obtained when s is infinitely great. Consequently s′ = -f′; the difference of sign is obvious, since s′ is measured from S, while f′ is measured from F′. The focal lengths are directly deducible from equation (7):—
f′ = −n′r / (n′ − n)
f = nr / (n′ − n).
By joining this simple refracting system with a similar one, so that the second spherical surface limits the medium of refractive index n′, we derive the spherical lens. Generally the two spherical surfaces enclose a glass lens, and are bounded on the outside by air of refractive index 1.
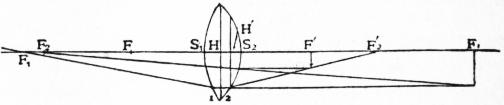
The deduction of the cardinal points of a spherical glass lens in air from the relations already proved is readily effected if we regard the lens as a combination of two systems each having one refracting surface, the light passing in the first system from air to glass, and in the second from glass to air. If we know the refractive index of the glass n, the radii r1, r2 of the spherical surfaces, and the distances of the two lens-vertices (or the thickness of the lens d) we can determine all the properties of the lens. A biconvex lens is shown in fig. 8. Let F1 be the first principal focus of the first system of radius r1, and F1′ the second principal focus; and let S1 be its vertex. Denote the distance F1 S1 (the first principal focal length) by f1, and the corresponding distance F′1 S1 by f′1. Let the corresponding quantities in the second system be denoted by the same letters with the suffix 2.
By equations (8) and (9) we have
| f1 = | r1 | , f′1 = − | nr1 | , f2 = − | nr2 | , f′2 = | r2 | , |
| n − 1 | n − 1 | n − 1 | n − 1 |
f2 having the opposite sign to f1. Denoting the distance F′1F2 by Δ, we have Δ = F′1F2 = F′1S1 + S1S2 + S2F2 = F′1S1 + S1S2 − F2S2 = f′1 + d − f2. Substituting for f′1 and f2 we obtain
| Δ = − | nr1 | + d + | nr2 | . |
| n − 1 | n − 1 |
Writing R = Δ(n − 1), this relation becomes
R = n(r2 − r1) + d(n − 1).
We have already shown that f (the first principal focal length of a compound system) = −f1f2/Δ. Substituting for f1, f2 and Δ the values found above, we obtain
| f = | r1r2n | = | r1r2n | , |
| (n − 1)R | (n − 1) {n (r2 − r1) + d(n − 1)} |
which is equivalent to
| 1 | = (n − 1) { | 1 | − | 1 | } + | (n − 1)2 d | . |
| f | r1 | r2 | r1r2n |
If the lens be infinitely thin, i.e. if d be zero, we have for the first principal focal length.
| 1 | = (n − 1) { | 1 | − | 1 | }. |
| f | r1 | r2 |
By the same method we obtain for the second principal focal length
| f′ = | f′1f′2 | = − | nr1r2 | = −f. |
| Δ | (n − 1)R |
 |
| Fig. 8. |
The reciprocal of the focal length is termed the power of the lens and is denoted by φ. In formulae involving φ it is customary to denote the reciprocal of the radii by the symbol ρ; we thus have φ = 1/f, ρ = 1/r. Equation (10) thus becomes
| φ = (n − 1) (ρ1 − ρ2) + | (n − 1)2 dρ1ρ2 | . |
| n |
The unit of power employed by spectacle-makers is termed the diopter or dioptric (see Spectacles).
We proceed to determine the distances of the focal points from the vertices of the lens, i.e. the distances FS1 and F′S2. Since F is represented by the first system in F2, we have by equation (2)
| x1 = | f1f′1 | = | f1f′1 | = − | nr12 | , |
| x′1 | Δ | (n − 1)R |
where x1 = F1F, and x′1 = F′1F2 = Δ. The distance of the first principal focus from the vertex S, i.e. S1F, which we denote by sF is given by sF = S1F = S1F1 + F1F = −F1S1 + F1F. Now F1S1 is the distance from the vertex of the first principal focus of the first system, i.e. f1 and F1F = x1. Substituting these values, we obtain
| sF = − | r1 | − | nr12 | = − | r1 (nr1 + R) | . |
| n − 1 | (n − 1)R | (n − 1)R |
The distance F′2F′ or x′2 is similarly determined by considering F′1 to be represented by the second system in F′.
We have
| x′2 = | f2f′2 | = − | f2f′2 | = | nr22 | , |
| x2 | Δ | (n − 1)R |
so that
| sF′ = x′2 − f′2 = | r2 (nr2 − R) | , |
| (n − 1)R |
where sF′ denotes the distance of the second principal focus from the vertex S2.
The two focal lengths and the distances of the foci from the vertices being known, the positions of the remaining cardinal points, i.e. the principal points H and H′, are readily determined. Let sH = S1H, i.e. the distance of the object-side principal point from the vertex of the first surface, and sH′ = S2H′, i.e. the distance of the image-side principal point from the vertex of the second surface, then f = FH = FS1 + S1H = −S1F + S1H = −sF + sH; hence sH = sF + f = −dr1/R. Similarly sH′ = sF′ + f′ = −dr2/R. It is readily seen that the distances sH and sH′ are in the ratio of the radii r1 and r2.
The distance between the two principal planes (the interstitium) is deduced very simply. We have S1S2 = S1H + HH′ + H′S2, or HH′ = S1S2 − S1H + S2H′. Substituting, we have
HH′ = d − sH + sH′ = d(n − 1) (r2 − r1 + d)/R.
The interstitium becomes zero, or the two principal planes coincide, if d = r1 − r2.
We have now derived all the properties of the lens in terms of its elements, viz. the refractive index, the radii of the surfaces, and the thickness.
Forms of Lenses.—By varying the signs and relative magnitude of the radii, lenses may be divided into two groups according to their action, and into four groups according to their form.
According to their action, lenses are either collecting, convergent and condensing, or divergent and dispersing; the term positive is sometimes applied to the former, and the term negative to the latter. Convergent lenses transform a parallel pencil into a converging one, and increase the convergence, and diminish the divergence of any pencil. Divergent lenses, on the other hand, transform a parallel pencil into a diverging one, and diminish the convergence, and increase the divergence of any pencil. In convergent lenses the first principal focal distance is positive and the second principal focal distance negative; in divergent lenses the converse holds.
The four forms of lenses are interpretable by means of equation (10).
| f = | r1r2n | . |
| (n − 1) { n (r2 − r1) + d(n − 1)} |
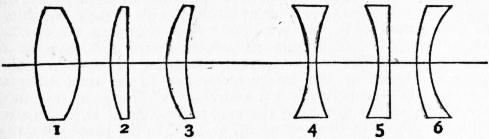 |
| Fig. 9. |
(1) If r1 be positive and r2 negative. This type is called biconvex (fig. 9, 1). The first principal focus is in front of the lens, and the second principal focus behind the lens, and the two principal points are inside the lens. The order of the cardinal points is therefore FS1HH′S2F′. The lens is convergent so long as the thickness is less than n(r1 − r2)/(n − 1). The special case when one of the radii is infinite, in other words, when one of the bounding surfaces is plane is shown in fig. 9, 2. Such a collective lens is termed plano-convex. As d increases, F and H move to the right and F′ and H′ to the left. If d = n(r1 − r2)/(n − 1), the focal length is infinite, i.e. the lens is telescopic. If the thickness be greater than n(r1 − r2)/(n − 1), the lens is dispersive, and the order of the cardinal points is HFS1S2F′H′.
(2) If r1 is negative and r2 positive. This type is called biconcave (fig. 9, 4). Such lenses are dispersive for all thicknesses. If d increases, the radii remaining constant, the focal lengths diminish. It is seen from the equations giving the distances of the cardinal points from the vertices that the first principal focus F is always behind S1, and the second principal focus F′ always in front of S2, and that the principal points are within the lens, H′ always following H. If one of the radii becomes infinite, the lens is plano-concave (fig. 9, 5).
(3) If the radii are both positive. These lenses are called convexo-concave. Two cases occur according as r2 > r1, or < r1. (a) If r2 > r1, we obtain the mensicus (fig. 9, 3). Such lenses are always collective; and the order of the cardinal points is FHH′F′. Since sF and sH are always negative, the object-side cardinal points are always in front of the lens. H′ can take up different positions. Since sH′ = −dr2/R = −dr2/{n (r2 − r1) + d(n − 1)}, sH′ is greater or less than d, i.e. H′ is either in front of or inside the lens, according as d < or > {r2 − n(r2 − r1)}/(n − 1). (b) If r2 < r1 the lens is dispersive so long as d < n(r1 − r2)/(n − 1). H is always behind S1 and H′ behind S2, since sH and sH′ are always positive. The focus F is always behind S1 and F′ in front of S2. If the thickness be small, the order of the cardinal points is F′HH′F; a dispersive lens of this type is shown in fig. 9, 6. As the thickness increases, H, H′ and F move to the right, F more rapidly than H, and H more rapidly than H′; F′, on the other hand, moves to the left. As with biconvex lenses, a telescopic lens, having all the cardinal points at infinity, results when d = n(r1 − r2)/(n − 1). If d > n(r1 − r2)/(n − 1), f is positive and the lens is collective. The cardinal points are in the same order as in the mensicus, viz. FHH′F′; and the relation of the principal points to the vertices is also the same as in the mensicus.
(4) If r1 and r2 are both negative. This case is reduced to (3) above, by assuming a change in the direction of the light, or, in other words, by interchanging the object- and image-spaces.
The six forms shown in fig. 9 are all used in optical constructions. It may be stated fairly generally that lenses which are thicker at the middle are collective, while those which are thinnest at the middle are dispersive.
 |
| Fig. 10. |
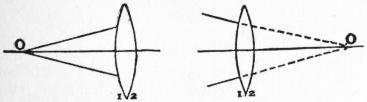
Different Positions of Object and Image.—The principal points are always near the surfaces limiting the lens, and consequently the lens divides the direct pencil containing the axis into two parts. The object can be either in front of or behind the lens as in fig. 10. If the object point be in front of the lens, and if it be realized by rays passing from it, it is called real. If, on the other hand, the object be behind the lens, it is called virtual; it does not actually exist, and can only be realized as an image.
 |
| Fig. 11. |
When we speak of “object-points,” it is always understood that the rays from the object traverse the first surface of the lens before meeting the second. In the same way, images may be either real or virtual. If the image be behind the second surface, it is real, and can be intercepted on a screen. If, however, it be in front of the lens, it is visible to an eye placed behind the lens, although the rays do not actually intersect, but only appear to do so, but the image cannot be intercepted on a screen behind the lens. Such an image is said to be virtual. These relations are shown in fig. 11.
 |
| Fig. 12. |
By referring to the equations given above, it is seen that a thin convergent lens produces both real and virtual images of real objects, but only a real image of a virtual object, whilst a divergent lens produces a virtual image of a real object and both real and virtual images of a virtual object. The construction of a real image of a real object by a convergent lens is shown in fig. 3; and that of a virtual image of a real object by a divergent lens in fig. 12.
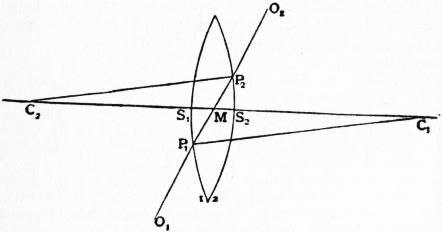 |
| Fig. 13. |
The optical centre of a lens is a point such that, for any ray which passes through it, the incident and emergent rays are parallel. The idea of the optical centre was originally due to J. Harris (Treatise on Optics, 1775); it is not properly a cardinal point, although it has several interesting properties. In fig. 13, let C1P1 and C2P2 be two parallel radii of a biconvex lens. Join P1P2 and let O1P1 and O2P2 be incident and emergent rays which have P1P2 for the path through the lens. Then if M be the intersection of P1P2 with the axis, we have angle C1P1M = angle C2P2M; these two angles are—for a ray travelling in the direction O1P1P2O2—the angles of emergence and of incidence respectively. From the similar triangles C2P2M and C1P1M we have
C1M : C2M = C1P1 : C2P2 = r1 : r2.
Such rays as P1P2 therefore divide the distance C1C2 in the ratio of the radii, i.e. at the fixed point M, the optical centre. Calling S1M = s1, S2M = s2, then C1S1 = C1M + MS1 = C1M − S1M, i.e. since C1S1 = r1, C1M = r1 + s1, and similarly C2M = r2 + s2. Also S1S2 = S1M + MS2 = S1M − S2M, i.e. d = s1 − s2. Then by using equation (11) we have s1 = r1d/(r − r2) and s2 = r2d/(r1 − r2), and hence s1/s2 = r1/r2. The vertex distances of the optical centre are therefore in the ratio of the radii.
The values of s1 and s2 show that the optical centre of a biconvex or biconcave lens is in the interior of the lens, that in a plano-convex or plano-concave lens it is at the vertex of the curved surface, and in a concavo-convex lens outside the lens.
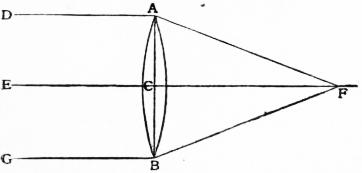
The Wave-theory Derivation of the Focal Length.—The formulae above have been derived by means of geometrical rays. We here give an account of Lord Rayleigh’s wave-theory derivation of the focal length of a convex lens in terms of the aperture, thickness and refractive index (Phil. Mag. 1879 (5) 8, p. 480; 1885, 20, p. 354); the argument is based on the principle that the optical distance from object to image is constant.
 |
| Fig. 14. |
“Taking the case of a convex lens of glass, let us suppose that parallel rays DA, EC, GB (fig. 14) fall upon the lens ACB, and are collected by it to a focus at F. The points D, E, G, equally distant from ACB, lie upon a front of the wave before it impinges upon the lens. The focus is a point at which the different parts of the wave arrive at the same time, and that such a point can exist depends upon the fact that the propagation is slower in glass than in air. The ray ECF is retarded from having to pass through the thickness (d) of glass by the amount (n − 1)d. The ray DAF, which traverses only the extreme edge of the lens, is retarded merely on account of the crookedness of its path, and the amount of the retardation is measured by AF − CF. If F is a focus these retardations must be equal, or AF − CF = (n − 1)d. Now if y be the semi-aperture AC of the lens, and f be the focal length CF, AF − CF = √(f2 + y2) − f = ½y2/f approximately, whence
f = ½y2 / (n − 1)d.
In the case of plate-glass (n − 1) = ½ (nearly), and then the rule (12) may be thus stated: the semi-aperture is a mean proportional between the focal length and the thickness. The form (12) is in general the more significant, as well as the more practically useful, but we may, of course, express the thickness in terms of the curvatures and semi-aperture by means of d = ½y2 (r1−1 − r2−1). In the preceding statement it has been supposed for simplicity that the lens comes to a sharp edge. If this be not the case we must take as the thickness of the lens the difference of the thicknesses at the centre and at the circumference. In this form the statement is applicable to concave lenses, and we see that the focal length is positive when the lens is thickest at the centre, but negative when the lens is thickest at the edge.”
Regulation of the Rays.
The geometrical theory of optical instruments can be conveniently divided into four parts: (1) The relations of the positions and sizes of objects and their images (see above); (2) the different aberrations from an ideal image (see Aberration); (3) the intensity of radiation in the object- and image-spaces, in other words, the alteration of brightness caused by physical or geometrical influences; and (4) the regulation of the rays (Strahlenbegrenzung).
 |
| Fig. 15. |
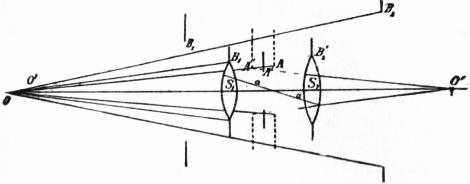
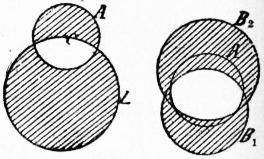
The regulation of rays will here be treated only in systems free from aberration. E. Abbe first gave a connected theory; and M. von Rohr has done a great deal towards the elaboration. The Gauss cardinal points make it simple to construct the image of a given object. No account is taken of the size of the system, or whether the rays used for the construction really assist in the reproduction of the image or not. The diverging cones of rays coming from the object-points can only take a certain small part in the production of the image in consequence of the apertures of the lenses, or of diaphragms. It often happens that the rays used for the construction of the image do not pass through the system; the image being formed by quite different rays. If we take a luminous point of the object lying on the axis of the system then an eye introduced at the image-point sees in the instrument several concentric rings, which are either the fittings of the lenses or their images, or the real diaphragms or their images. The innermost and smallest ring is completely lighted, and forms the origin of the cone of rays entering the image-space. Abbe called it the exit pupil. Similarly there is a corresponding smallest ring in the object-space which limits the entering cone of rays. This is called the entrance pupil. The real diaphragm acting as a limit at any part of the system is called the aperture-diaphragm. These diaphragms remain for all practical purposes the same for all points lying on the axis. It sometimes happens that one and the same diaphragm fulfils the functions of the entrance pupil and the aperture-diaphragm or the exit pupil and the aperture-diaphragm.
Fig. 15 shows the general but simplified case of the different diaphragms which are of importance for the regulation of the rays. S1, S2 are two centred systems. A′ is a real diaphragm lying between them. B1 and B′2 are the fittings of the systems. Then S1 produces the virtual image A of the diaphragm A′ and the image B2 of the fitting B′2, whilst the system S2 makes the virtual image A″ of the diaphragm A′ and the virtual image B′1 of the fitting B1. The object-point O is reproduced really through the whole system in the point O′. From the object-point O three diaphragms can be seen in the object-space, viz. the fitting B1, the image of the fitting B2 and the image A of the diaphragm A′ formed by the system S1. The cone of rays nearest to B2 is not received to its total extent by the fitting B1, and the cone which has entered through B1 is again diminished in its further course, when passing through the diaphragm A′, so that the cone of rays really used for producing the image is limited by A, the diaphragm which seen from O appears to be the smallest. A is therefore the entrance pupil. The real diaphragm A′ which limits the rays in the centre of the system is the aperture diaphragm. Similarly three diaphragms lying in the image-space are to be seen from the image-point O′—namely B′, A″, and B′2. A″ limits the rays in the image-space, and is therefore the exit pupil. As A is conjugate to the diaphragm A′ in the system S1, and A″ to the same diaphragm A′ in the system S2, the entrance pupil A is conjugate to the exit pupil A″ throughout the instrument. This relation between entrance and exit pupils is general.
 |
| Fig. 16. |
 |
| Fig. 17a. Fig. 17b. |
The apices of the cones of rays producing the image of points near the axis thus lie in the object-points, and their common base is the entrance pupil. The axis of such a cone, which connects the object point with the centre of the entrance pupil, is called the principal ray. Similarly, the principal rays in the image-space join the centre of the exit pupil with the image-points. The centres of the entrance and exit pupils are thus the intersections of the principal rays.
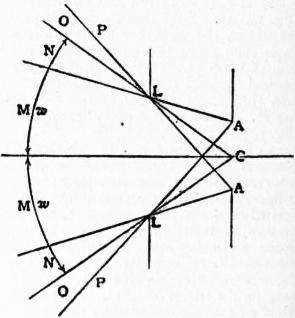
For points lying farther from the axis, the entrance pupil no longer alone limits the rays, the other diaphragms taking part. In fig. 16 only one diaphragm L is present besides the entrance pupil A, and the object-space is divided to a certain extent into four parts. The section M contains all points rendered by a system with a complete aperture; N contains all points rendered by a system with a gradually diminishing aperture; but this diminution does not attain the principal ray passing through the centre C. In the section O are those points rendered by a system with an aperture which gradually decreases to zero. No rays pass from the points of the section P through the system and no image can arise from them. The second diaphragm L therefore limits the three-dimensional object-space containing the points which can be rendered by the optical system. From C through this diaphragm L this three-dimensional object-space can be seen as through a window. L is called by M von Rohr the entrance luke. If several diaphragms can be seen from C, then the entrance luke is the diaphragm which seen from C appears the smallest. In the sections N and O the entrance luke also takes part in limiting the cones of rays. This restriction is known as the “vignetting” action of the entrance luke. The base of the cone of rays for the points of this section of the object-space is no longer a circle but a two-cornered curve which arises from the object-point by the projection of the entrance luke on the entrance pupil. Fig. 17a shows the base of such a cone of rays. It often happens that besides the entrance luke, another diaphragm acts in a vignetting manner, then the operating aperture of the cone of rays is a curve made up of circular arcs formed out of the entrance pupil and the two projections of the two acting diaphragms (fig. 17b).
If the entrance pupil is narrow, then the section NO, in which the vignetting is increasing, is diminished, and there is really only one division of the section M which can be reproduced, and of the section P which cannot be reproduced. The angle w + w = 2w, comprising the section which can be reproduced, is called the angle of the field of view on the object-side. The field of view 2w retains its importance if the entrance pupil is increased. It then comprises all points reached by principal rays. The same relations apply to the image-space, in which there is an exit luke, which, seen from the middle of the exit pupil, appears under the smallest angle. It is the image of the entrance luke produced by the whole system. The image-side field of view 2w′ is the angle comprised by the principal rays reaching the edge of the exit luke.
 |
| Fig. 18. |
Most optical instruments are used to observe object-reliefs (three-dimensional objects), and generally an image-relief (a three-dimensional image) is conjugate to this object-relief. It is sometimes required, however, to represent by means of an optical instrument the object-relief on a plane or on a ground-glass as in the photographic camera. For simplicity we shall assume the intercepting plane as perpendicular to the axis and shall call it, after von Rohr, the “ground glass plane.” All points of the image not lying in this plane produce circular spots (corresponding to the form of the pupils) on it, which are called “circles of confusion.” The ground-glass plane (fig. 18) is conjugate to the object-plane E in the object-space, perpendicular to the axis, and called the “plane focused for.” All points lying in this plane are reproduced exactly on the ground-glass plane as the points OO. The circle of confusion Z on the plane focused for corresponds to the circle of confusion Z′ on the ground-glass plane. The figure formed on the plane focused for by the cones of rays from all of the object-points of the total object-space directed to the entrance pupil, was called “object-side representation” (imago) by M von Rohr. This representation is a central projection. If, for instance, the entrance pupil is imagined so small that only the principal rays pass through, then they project directly, and the intersections of the principal rays represent the projections of the points of the object lying off the plane focused for. The centre of the projection or the perspective centre is the middle point of the entrance pupil C. If the entrance pupil is opened, in place of points, circles of confusion appear, whose size depends upon the size of the entrance pupil and the position of the object-points and the plane focused for. The intersection of the principal ray is the centre of the circle of confusion. The clearness of the representation on the plane focused for is of course diminished by the circles of confusion. This central projection does not at all depend upon the instrument, but is entirely geometrical, arising when the position and the size of the entrance pupil, and the position of the plane focused for have been fixed. The instrument then produces an image on the ground-glass plane of this perspective representation on the plane focused for, and on account of the exact likeness which this image has to the object-side representation it is called the “representation copy.” By moving it round an angle of 180°, this representation can be brought into a perspective position to the objects, so that all rays coming from the middle of the entrance pupil and aiming at the object-points, would always meet the corresponding image-points. This representation is accessible to the observer in different ways in different instruments. If the observer desires a perfectly correct perspective impression of the object-relief the distance of the pivot of the eye from the representation copy must be equal to the nth part of the distance of the plane focused for from the entrance pupil, if the instrument has produced a nth diminution of the object-side representation. The pivot of the eye must coincide with the centre of the perspective, because all images are observed in direct vision. It is known that the pivot of the eye is the point of intersection of all the directions in which one can look. Thus all these points represented by circles of confusion which are less than the angular sharpness of vision appear clear to the eye; the space containing all these object-points, which appear clear to the eye, is called the depth. The depth of definition, therefore, is not a special property of the instrument, but depends on the size of the entrance pupil, the position of the plane focused for and on the conditions under which the representation can be observed.
If the distance of the representation from the pivot of the eye be altered from the correct distance already mentioned, the angles of vision under which various objects appear are changed; perspective errors arise, causing an incorrect idea to be given of the depth. A simple case is shown in fig. 19. A cube is the object, and if it is observed as in fig. 19a with the representation copy at the correct distance, a correct idea of a cube will be obtained. If, as in figs. 19b and 19c, the distance is too great, there can be two results. If it is known that the farthest section is just as high as the nearer one then the cube appears exceptionally deepened, like a long parallelepipedon. But if it is known to be as deep as it is high then the eye will see it low at the back and high at the front. The reverse occurs when the distance of observation is too short, the body then appears either too flat, or the nearer sections seem too low in relation to those farther off. These perspective errors can be seen in any telescope. In the telescope ocular the representation copy has to be observed under too large an angle or at too short a distance: all objects therefore appear flattened, or the more distant objects appear too large in comparison with those nearer at hand.
 |
| After von Rohr. |
| Fig. 19. |
 |
 |
| After von Rohr. | After von Rohr. |
| Fig. 20. | Fig. 21. |
 |
| After von Rohr. |
| Fig. 22. |
From the above the importance of experience will be inferred. But it is not only necessary that the objects themselves be known to the observer but also that they are presented to his eye in the customary manner. This depends upon the way in which the principal rays pass through the system—in other words, upon the special kind of “transmission” of the principal rays. In ordinary vision the pivot of the eye is the centre of the perspective representation which arises on the very distant plane standing perpendicular to the mean direction of sight. In this kind of central projection all objects lying in front of the plane focused for are diminished when projected on this plane, and those lying behind it are magnified. (The distances are always given in the direction of light.) Thus the objects near to the eye appear large and those farther from it appear small. This perspective has been called by M von Rohr1 “entocentric transmission” (fig. 20). If the entrance pupil of the instrument lies at infinity, then all the principal rays are parallel and the projections of all objects on the plane focused for are exactly as large as the objects themselves. After E. Abbe, this course of rays is called “telecentric transmission” (fig. 21). The exit pupil then lies in the image-side focus of the system. If the perspective centre lies in front of the plane focused for, then the objects lying in front of this plane are magnified and those behind it are diminished. This is just the reverse of perspective representation in ordinary sight, so that the relations of size and the arrangements for space must be quite incorrectly indicated (fig. 22); this representation is called by M von Rohr a “hypercentric transmission.”
1 M von Rohr, Zeitschr. für Sinnesphysiologie (1907), xli. 408-429.
↧ Download as ZWI file | Last modified: 11/17/2022 15:23:38 | 86 views
☰ Source: https://oldpedia.org/article/britannica11/Lens | License: Public domain in the USA. Project Gutenberg License
 ZWI signed:
ZWI signed: